

AGV intelligent scheduling method for automatic container terminal
A scheduling method and container technology, applied in the fields of genetic laws, combustion engines, internal combustion piston engines, etc., can solve the problems of growth, the need for dozens or even hundreds of units, and the local optimal solution of the algorithm, so as to improve the calculation speed and the calculation speed. Fast speed and low resource consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
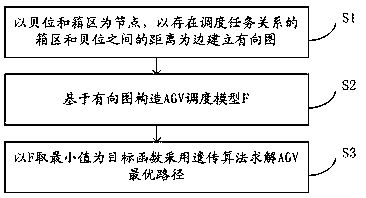
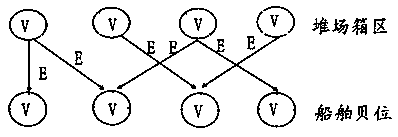
[0029] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0030] The present invention proposes an intelligent dispatching method for an automated container terminal AGV, aiming at realizing the shortest invalid operation time, and adopting a genetic algorithm to solve it.
[0031] The invalid working time of the AGV mainly includes two parts: waiting for the quay bridge and driving without load. Therefore, the present invention refers to the following points when establishing the AGV path optimization model:
[0032] (1) The priority of the quay crane is higher than that of the AGV; that is, during the scheduling process, if there is a situation where mechanical equipment needs to wait, the AGV can wait for the quay crane, but it should be avoided that the quay crane waits for the AGV.
[0033] (2) There is no need to wait between the AGV and the yard rail crane. The invention...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More