

Method and device for calibrating mechanical parameters of SCARA robot and SCARA robot
A technology of mechanical parameters and calibration methods, applied in the field of robots, can solve the problem of low calibration accuracy, and achieve the effect of improving absolute positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
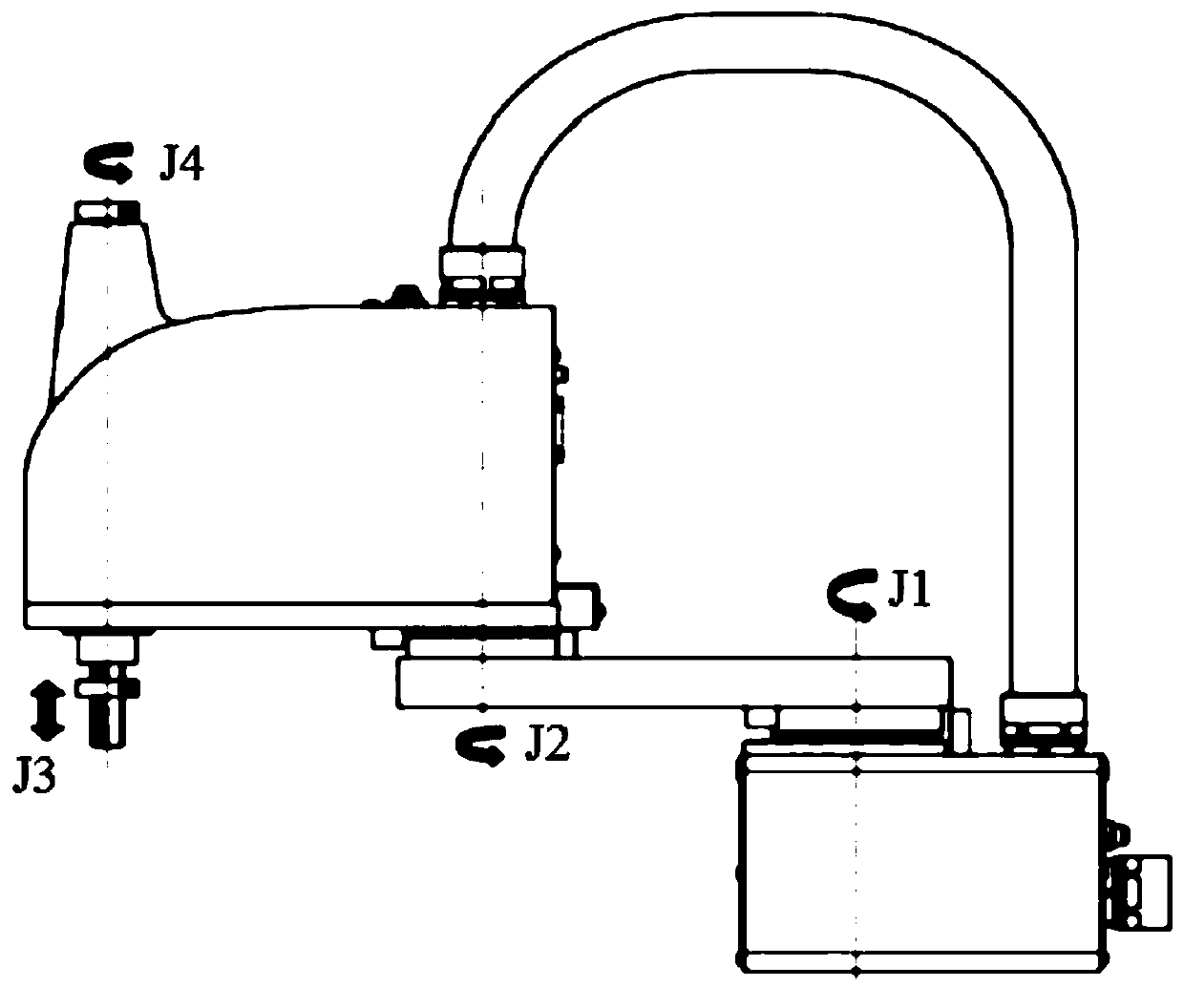
[0031] figure 1 Schematic diagram of the structure of the SCARA robot, figure 1 Among them, the SCARA robot has four joints, namely the first joint, the second joint, the third joint and the fourth joint, and the four arm lengths corresponding to the four joints, namely the first arm length, the second arm length, the The length of the three arms and the length of the fourth arm, the SCARA robot also includes four axes, that is, one axis, two axes, three axes and four axes, corresponding to figure 1 J1, J2, J3 and J4 in. Among them, the first joint, the second joint and the fourth joint are joints that rotate around the Z axis, and the third joint is a joint that translates along the Z axis. In the embodiment of the present invention, for the three joints that rotate around the Z axis Joints are calibrated.
[0032] In order to calibrate the SCARA robot, the application installs a position recording pen at the fourth joint of the robot, that is, the end position of the robo...
Embodiment 2
[0120] Such as Figure 5 as shown, Figure 5 A schematic flow chart of a method for calibrating the mechanical parameters of a SCARA robot provided in another embodiment of the present invention, before obtaining the first measurement data and the second measurement data of the robot, may also include the process of calibrating the reduction ratio of the robot, thereby It is convenient for angle acquisition according to the calibrated reduction ratio. Wherein, the calibration process of the reduction ratio includes:
[0121] S206: Control the specified joints of the robot to move, and record the starting point coordinates, intermediate point coordinates, and end point coordinates of the arc trajectory formed when the specified joints move, and the rotation angle of the specified joint motors.
[0122] Wherein, the designated joint may be any one of the first joint, the second joint and the fourth joint, and when the designated joint is controlled to move, other joints should...
Embodiment 3
[0138] Figure 6 A schematic diagram of a SCARA robot mechanical parameter calibration device provided for an embodiment of the present invention, including a first data acquisition module 601, a first calculation module 602, a control module 603, a second data acquisition module 604, and a second calculation module 605 . in:
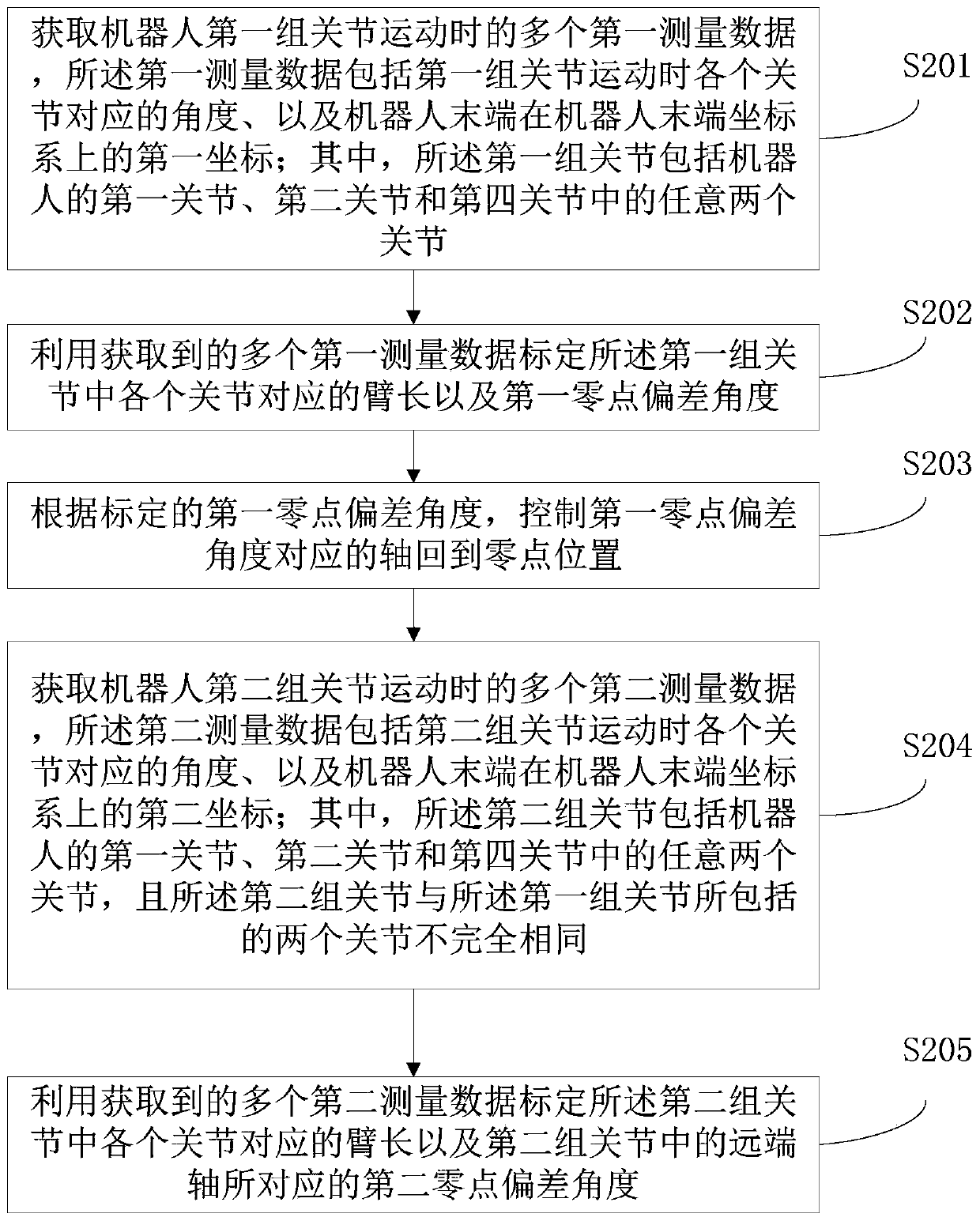
[0139] The first data acquisition module 601 is used to acquire a plurality of first measurement data when the first group of joints of the robot are in motion, the first measurement data includes the angles corresponding to each joint when the first group of joints are in motion, and the position of the end of the robot on the digital board. The first coordinate on the coordinate system; wherein, the first group of joints includes any two joints among the first joint, the second joint and the fourth joint of the robot.
[0140] The first calculation module 602 is configured to calibrate the arm length and the first zero point deviation angle correspo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More