

Full-automatic clamping mechanism oriented to large structural part
A technology of large-scale structural parts and clamping mechanism, applied in the direction of chucks, manipulators, manufacturing tools, etc., can solve the problems of potential safety hazards, poor clamping accuracy, and easy damage to the body, so as to achieve low cost and ensure safety. The effect of simple and reasonable design and structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in further detail below in conjunction with the accompanying drawings.
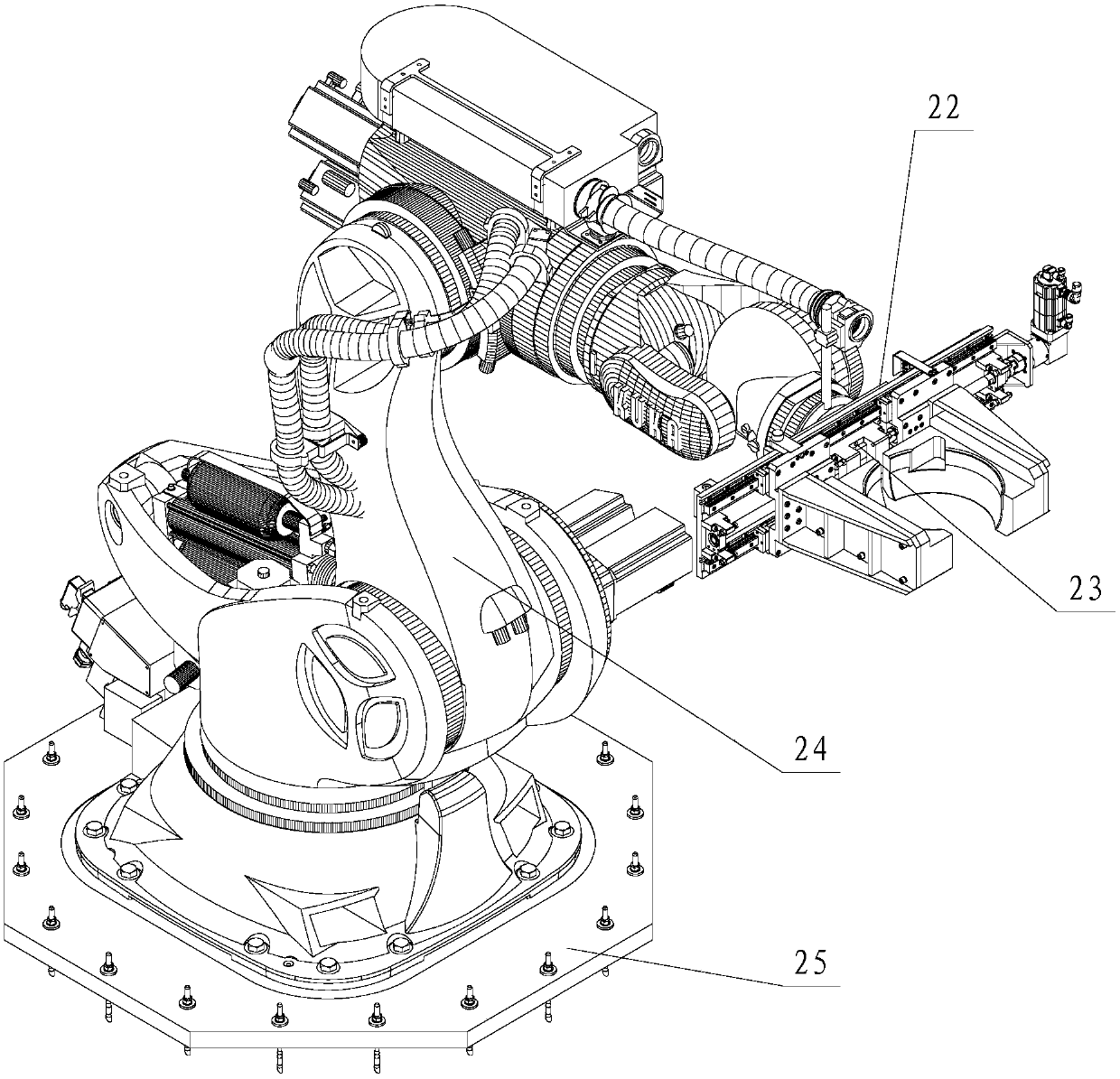
[0027] Such as Figure 1~5 As shown, the present invention includes an automatic clamping mechanism and a mobile adjustment robot, wherein the mobile adjustment robot includes a transition flange 22, a fixed angle pin 23, a six-degree-of-freedom robot 24 and a base 25, and the transition flange 22 passes through the fixed angle pin 23 and the bolt Installed on the sixth-axis connection end face of the six-degree-of-freedom robot 24, the six-degree-of-freedom robot 24 is fixed on the base 25 through high-strength bolts and positioning pins, and the base 25 is connected to the foundation through bolts, so that the six-degree-of-freedom robot 24 and the foundation form a A stable connection becomes one.
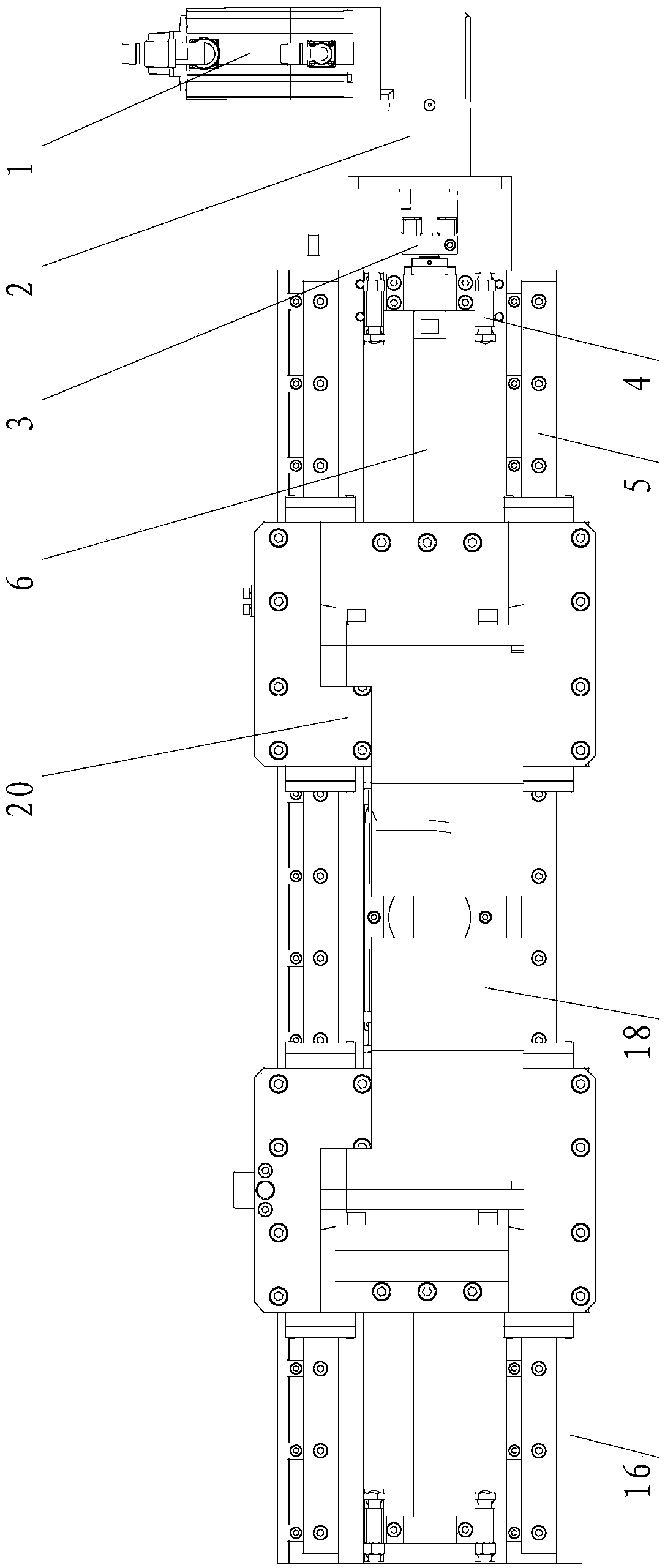
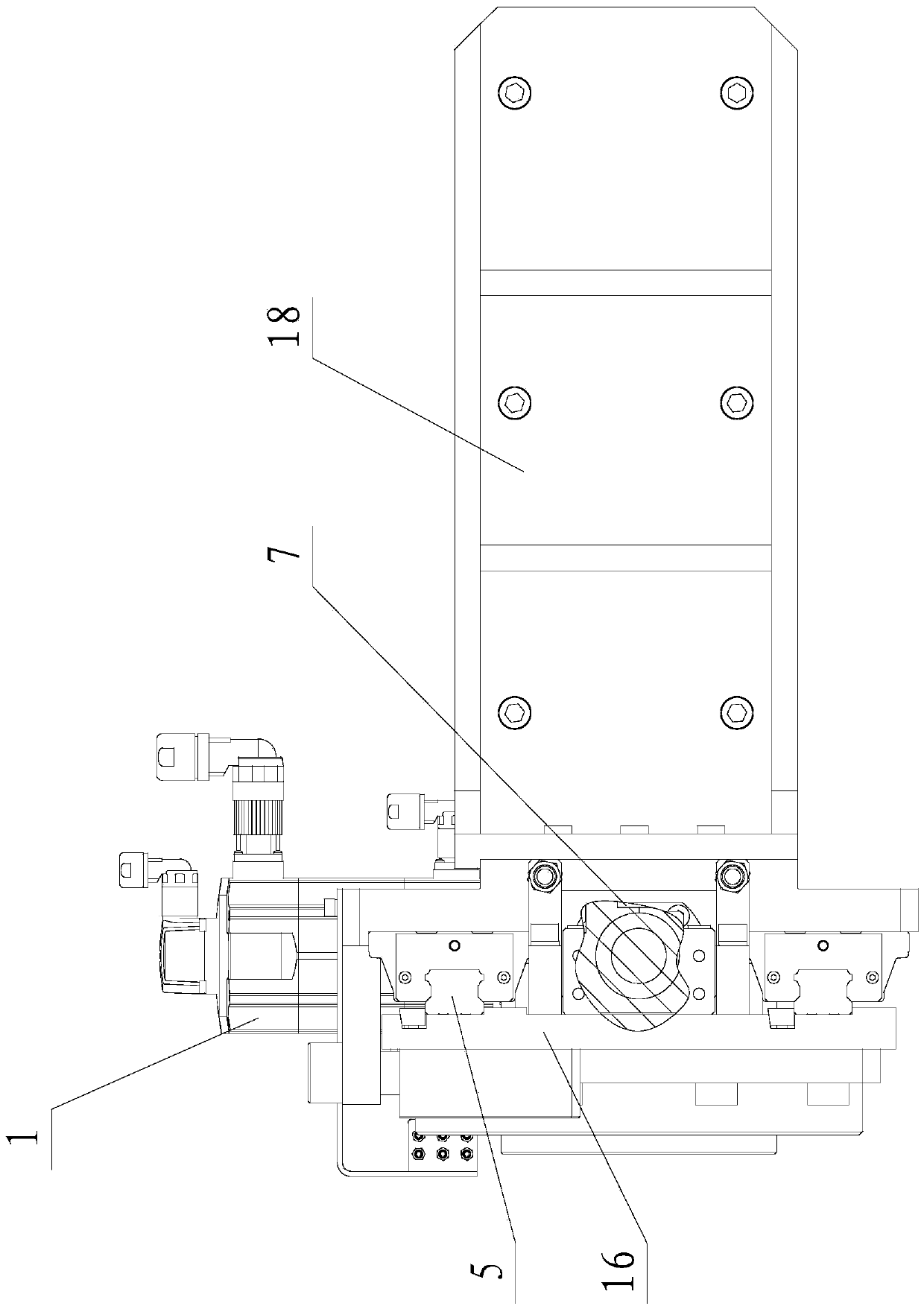
[0028] The automatic clamping mechanism is connected to the execution end of the six-degree-of-freedom robot 24 through the transition flange 22 (that is, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More