

Fixed-wing unmanned aerial vehicle landing control method based on self-adaptive dynamic inverse
A control method and unmanned aerial vehicle technology, applied in the direction of attitude control, non-electric variable control, control/regulation system, etc., can solve the difficult to meet the complex environment and high precision requirements of unmanned aerial vehicle landing, and the ship deck can be landed Issues such as narrow areas, complex atmospheric disturbances for drone landings, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0094] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
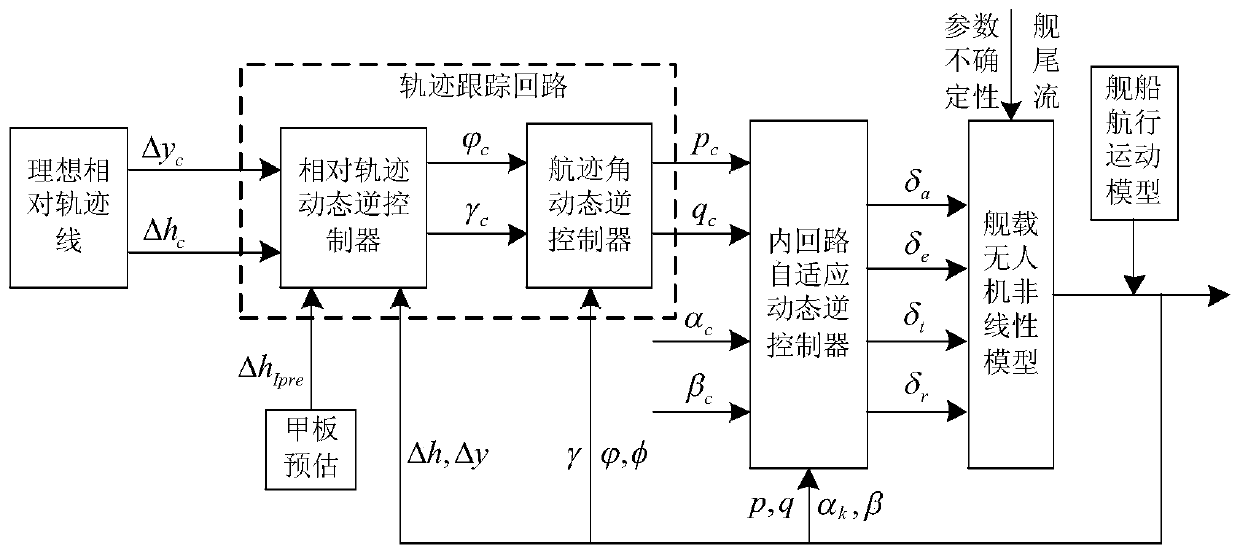
[0095] The present invention designs a fixed-wing unmanned aerial vehicle landing control method based on adaptive dynamic inversion, and the steps are as follows:
[0096] Step 1: Establish a nonlinear model of the UAV under wind disturbance, and obtain the expressions of the force and moment on the UAV;
[0097] Step 2: Design the inner loop control law based on the adaptive dynamic inverse method according to the inner loop differential equation of the UAV;
[0098] Step 3: Design the track angle loop control law based on the nonlinear dynamic inverse method;
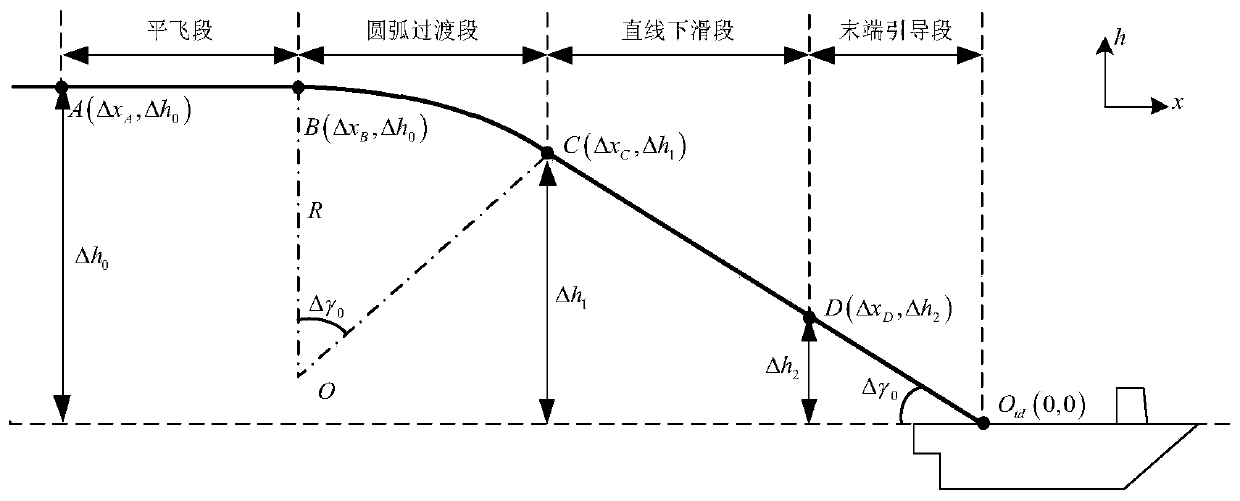
[0099] Step 4: Design the ideal relative trajectory of the UAV landing, the ideal relative trajectory includes the level flight section, the arc transition section, the straight down section and the end guidance section;
[0100] Step 5: Design the relative trajectory loop contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More