Visual positioning three-dimensional point cloud segmentation method
A 3D point cloud and visual positioning technology, applied in the field of visual positioning, can solve problems such as inapplicable segmentation, and achieve the effect of improving the accuracy of recognition and positioning and reasonable design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The specific implementation manner of the present invention will be described in further detail below by describing the embodiments with reference to the accompanying drawings.
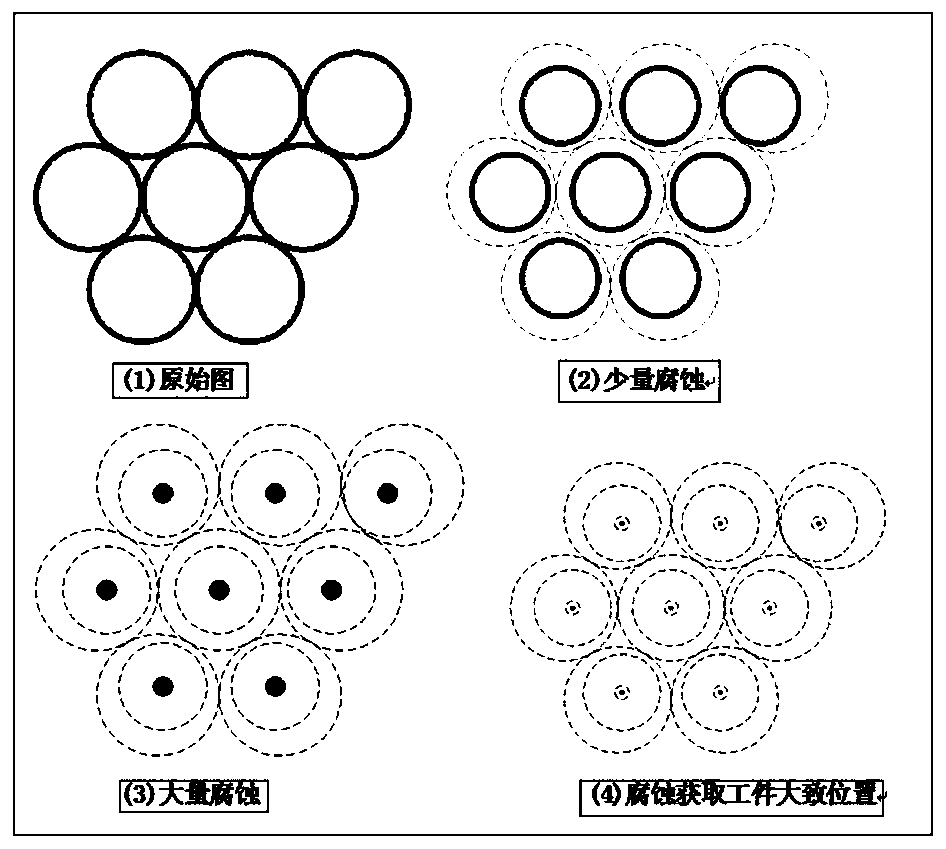
[0031] The visual positioning 3D point cloud segmentation method solves the problem that the traditional method (circle or ellipse detection) cannot realize the complete recognition of the object-low recognition rate after the laser radar sensor obtains the 3D point cloud information; Recognition but low positioning accuracy - big positioning error problem.
[0032] The visual positioning 3D point cloud segmentation method includes the following steps:
[0033] S1: The robot carries a 3D laser sensor to obtain the 3D point cloud information of the workpiece;
[0034] S2: Utilize the PCL point cloud library to realize the processing work such as filtering, sampling and smoothing of the point cloud, and remove the z-axis distance of the point cloud (it is uniformly set to 0);
[0035] S3: use t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More