

Monocular vision inertia SLAM method for dynamic scene
A monocular vision and dynamic scene technology, applied in neural learning methods, measuring devices, instruments, etc., can solve problems such as insufficient stability of robot SLAM systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0125] The technical solutions provided by the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the following specific embodiments are only used to illustrate the present invention and not to limit the scope of the present invention.
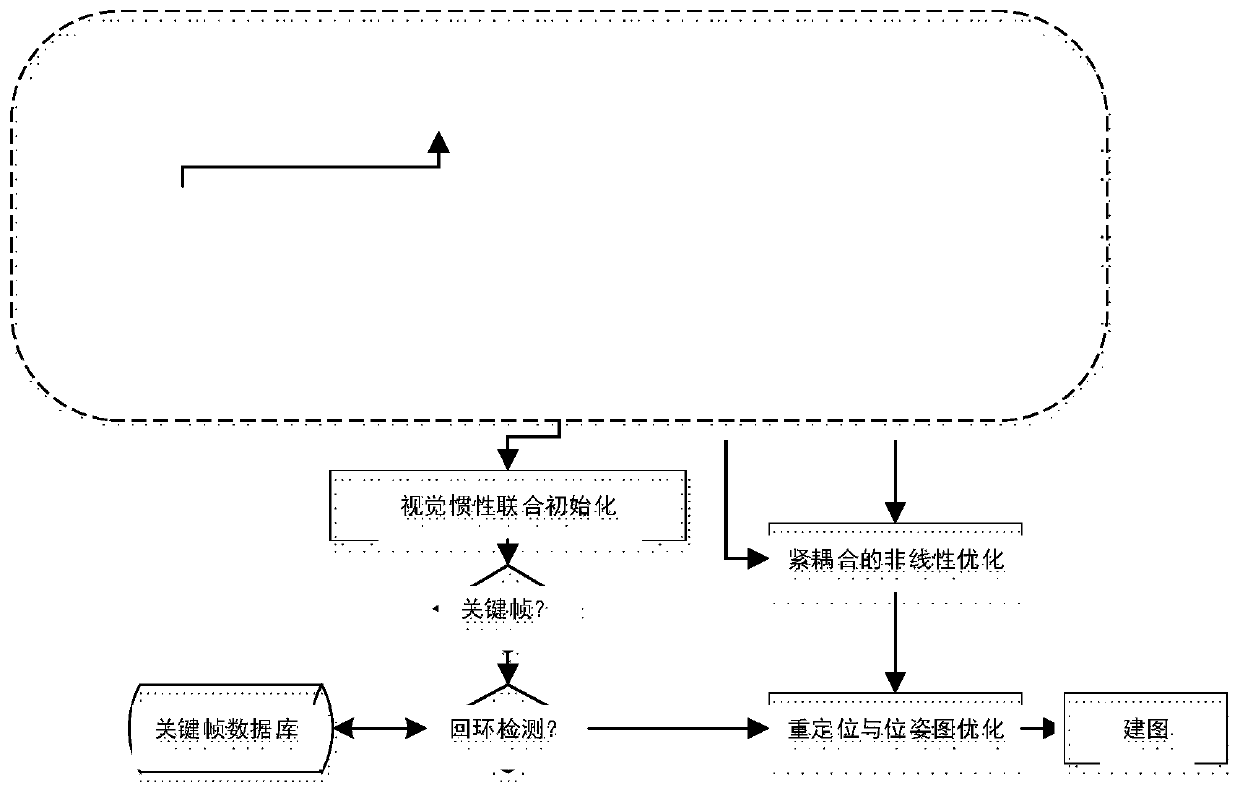
[0126] The present invention provides a dynamic scene-oriented monocular vision SLAM method, the realization principle is as follows figure 1 As shown, the process mainly includes the following steps:
[0127] Step S1: Use the collected data set to train the neural network, which specifically includes the following processes:
[0128] S1.1 Collect sample data sets and create a total of 3 data sets, including training set, test set, and verification set. The three samples are independent of each other and do not contain each other. In order to prevent network over-fitting, the collected data is augmented, and the following three methods are randomly used to process each ima...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More