

Pod attitude real-time measuring, resolving and monitoring device
A technology of real-time measurement and monitoring devices, applied in the directions of measuring devices, measuring angles, surveying and navigation, etc., can solve the problem of real-time monitoring of attitude information without considering the ground personnel, the complicated way of conversion and calculation process, and the lack of consideration of GPS antenna Placement point errors and other problems, to ensure real-time measurement, improve the efficiency of calculation, and save space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
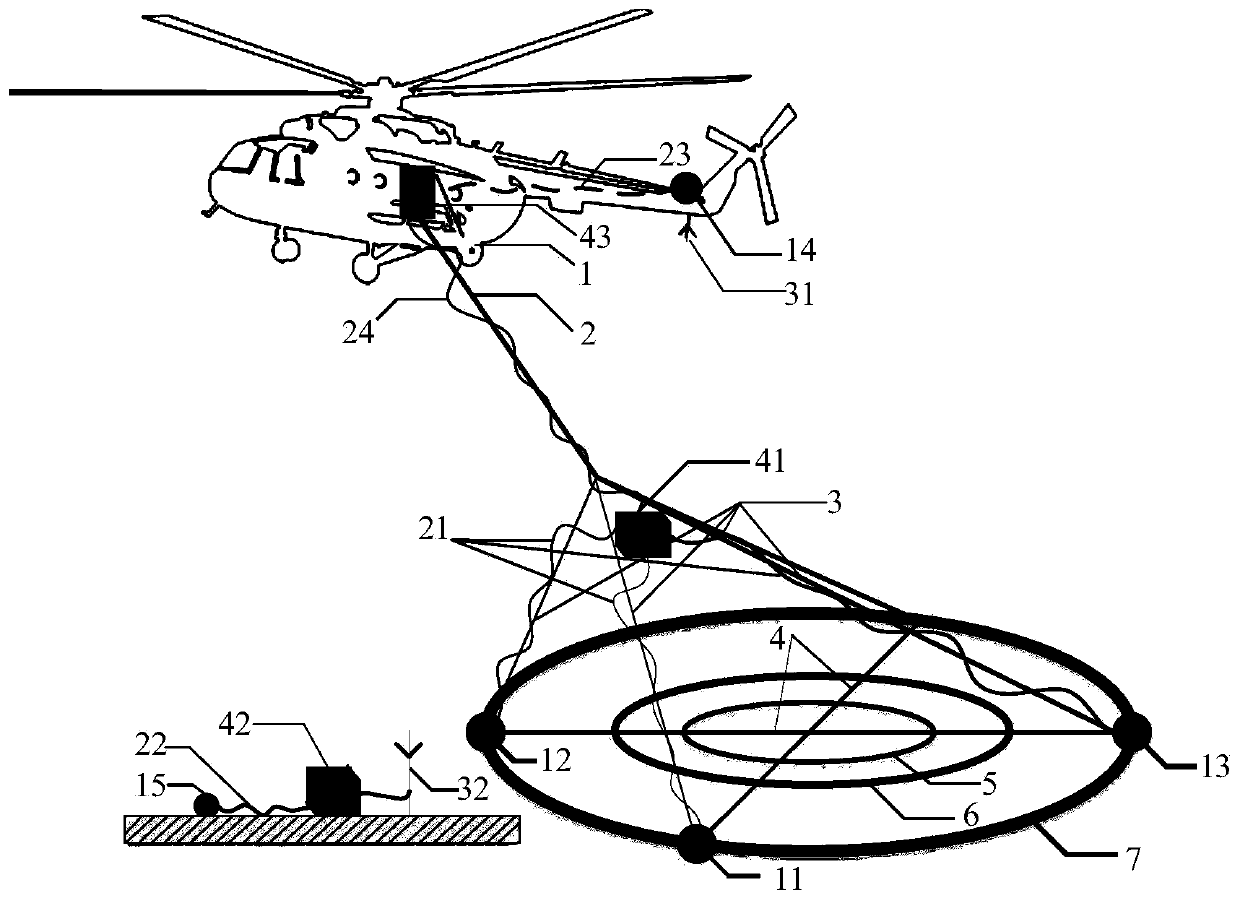
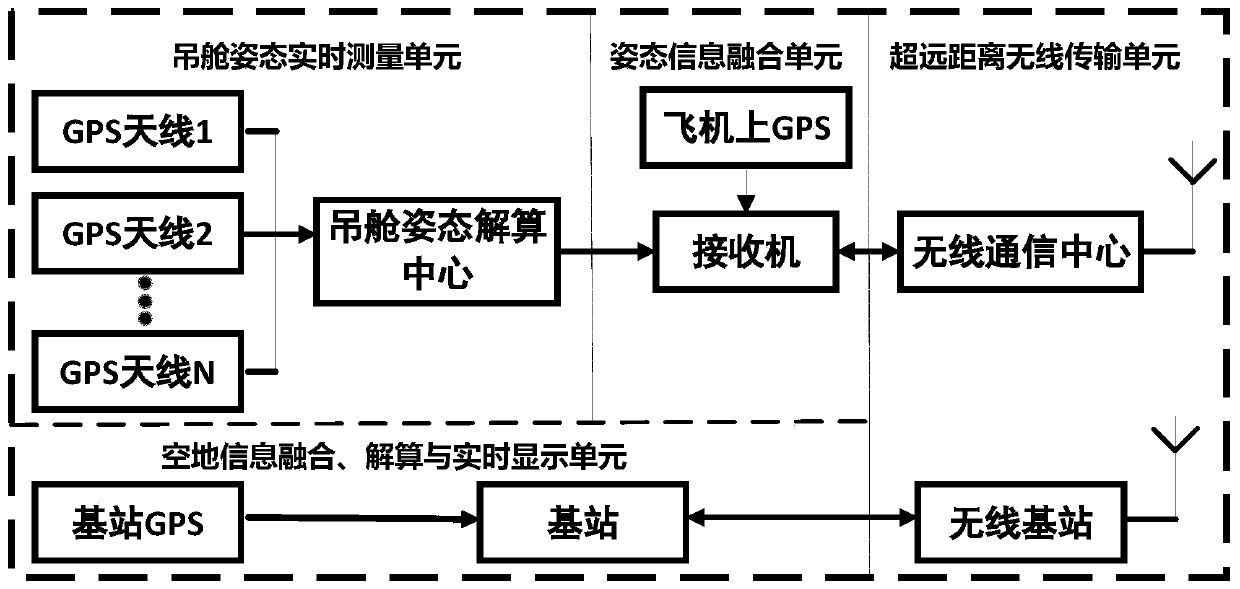
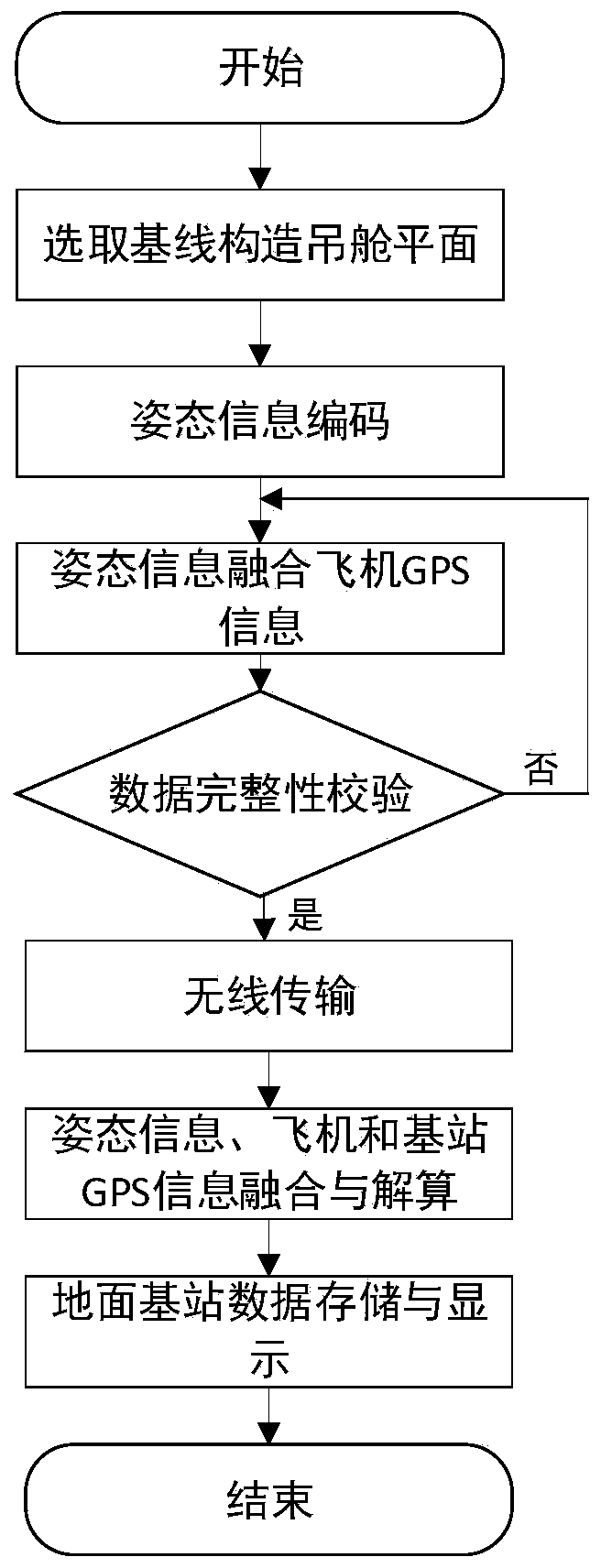
[0061] see figure 1 and image 3 As shown, the pod attitude real-time measurement, calculation and monitoring device, when the helicopter 1 and the pod (pod load-bearing rope 2, pod suspension rope 3, pod horizontal stay rope 4. In the pod-type time-domain aeronautical electromagnetic detection system composed of receiving coil 5, compensation coil 6 and transmitting coil 7, the pod horizontal stay rope 4, receiving coil 5, compensating coil 6 and transmitting coil 7 are all on the plane of the pod The main GPS antenna 11 placed on the pod, the secondary GPS antenna 12, the secondary GPS antenna 13 and the additional GPS antenna added according to requirements, the attitude measurement GPS antenna connection line 21, and the pod attitude calculation center 41 together constitute the pod attitude The real-time measurement unit obtains the attitude change of the pod relative to the main GPS antenna. The pod attitude calculation center transmits the pod attitude data to the rece...
Embodiment 2
[0114] The difference from Embodiment 1 is that one master GPS antenna and three slave GPS antennas are used. Before the pod attitude calculation center is used to calculate the pod attitude, it is first necessary to pass the GPS antenna on the plane without forming a plane to the plane. The determined pod plane:
[0115] see Figure 5 As shown, a main GPS antenna 11 named O is installed on the pod, and three slave GPS antennas are named A, B, and C respectively, and the four antennas are evenly distributed on the circular transmitting coil skeleton.
[0116] As shown in Figure 6, the four GPS antennas pass through the above Figure 4 After the fixed bracket is fixedly connected with the transmitting coil skeleton, with the main GPS antenna as the apex, there are OAC ( Figure 6a ), OAB ( Figure 6b ), OBC ( Figure 6c ) three planes, select the plane that is not on the plane and the shortest distance from the antenna to the plane as the plane of the pod. For example, the...
Embodiment 3
[0118] The difference from Embodiment 1 and Embodiment 2 is that the plane with the shortest sum of distances from the two antennas that are not on the plane to the plane needs to be used as the plane of the pod
[0119] see Figure 7 , a main GPS antenna (11) is installed on the pod to name O, and four auxiliary GPS antennas are named A, B, C, D respectively, and five antennas are evenly distributed on the circular transmitting coil skeleton.
[0120] see Figure 8 , the four GPS antennas pass the above Figure 4 After the fixed bracket is fixedly connected with the transmitting coil frame, with the main GPS antenna as the vertex, there are six planes OAB(a), OAC(b), OAD(c), OBC(d), OBD(e), and OCD(f) , select the plane that is shortest from the sum of the distances from the other two antennas to the plane that is not on the plane as the plane of the pod. For example,
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More