

An Estimation Algorithm for Dynamic Parameters of Force Feedback Devices Based on Particle Swarm Optimization
A technology of dynamic parameters and particle swarm algorithm, applied in the direction of instruments, adaptive control, control/regulation system, etc., can solve problems such as poor effect and large torque error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
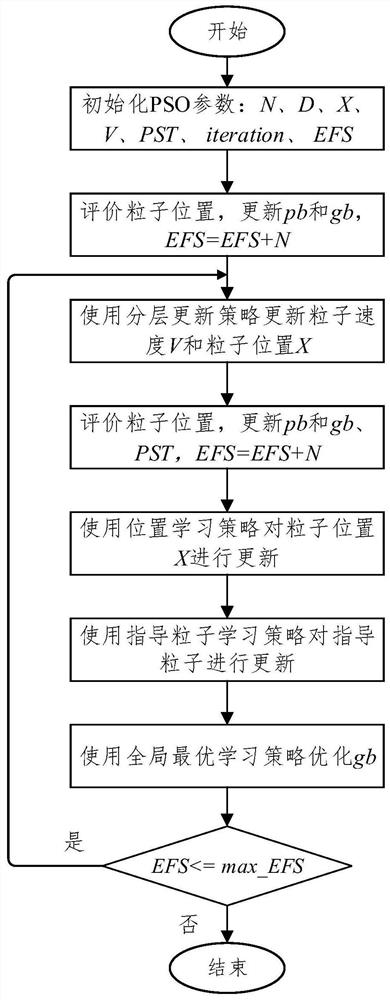
[0045] The invention will be further illustrated by the following examples.
[0046] Step 1: Set the ideal trajectory of the joint angle of the force feedback device;
[0047] The force feedback device has 3 rotatable joints J 1 、J 2 、J 3 , the corresponding three joint angles are θ 1 , θ 2 , θ 3 . The ideal motion trajectories for setting the three joint angles are: angle θ 1 (t), θ 2 (t), θ 3 (t), angular velocity angular acceleration details as follows:
[0048] Angle: θ 1 =0.5sint θ 2 =0.5sint θ 3 =0.2sint
[0049] Angular velocity:
[0050] Angular acceleration:
[0051] Step 2: Track the position of the ideal motion trajectory of the joint angle;
[0052] Use the PID control algorithm to control the three joints of the force feedback device to track the ideal trajectory, and obtain the input torque τ of the three joints 1 , τ 2 , τ 3 and angle θ 1 (t), θ 2 (t), θ 3 (t). Obtaining the Angular Velocity of Each Joint Using Nonlinear ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More