

Control method for unstable motion of unmanned vehicle after collision
An unmanned vehicle and control method technology, applied in the control field of unmanned vehicle instability motion after collision, can solve the problems of lateral and yaw motion affecting vehicle restraint and other problems, achieve optimization of bad state promotion and improve robustness the effect of improving accessibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The implementation cases of the present invention will be described in detail below in conjunction with the accompanying drawings.
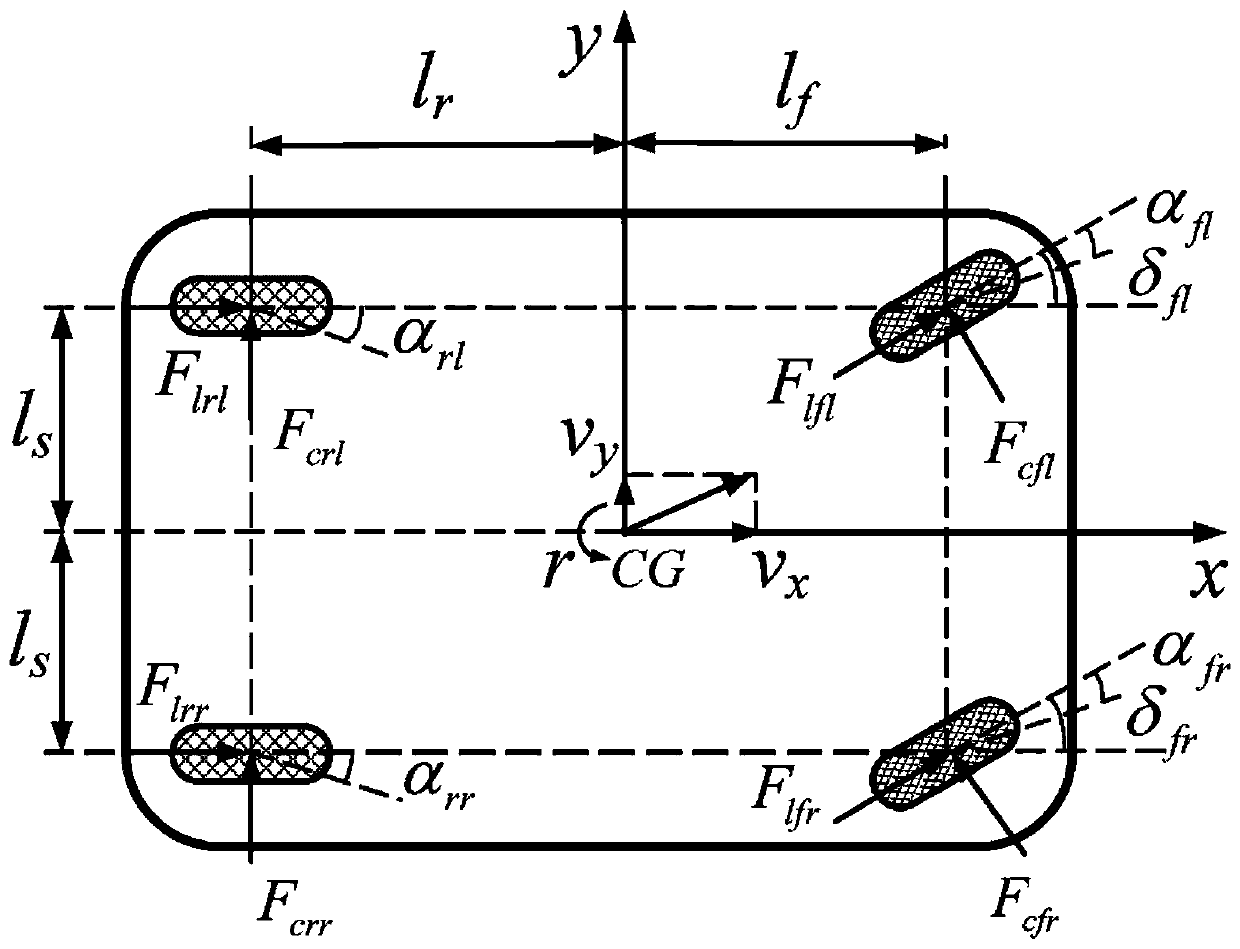
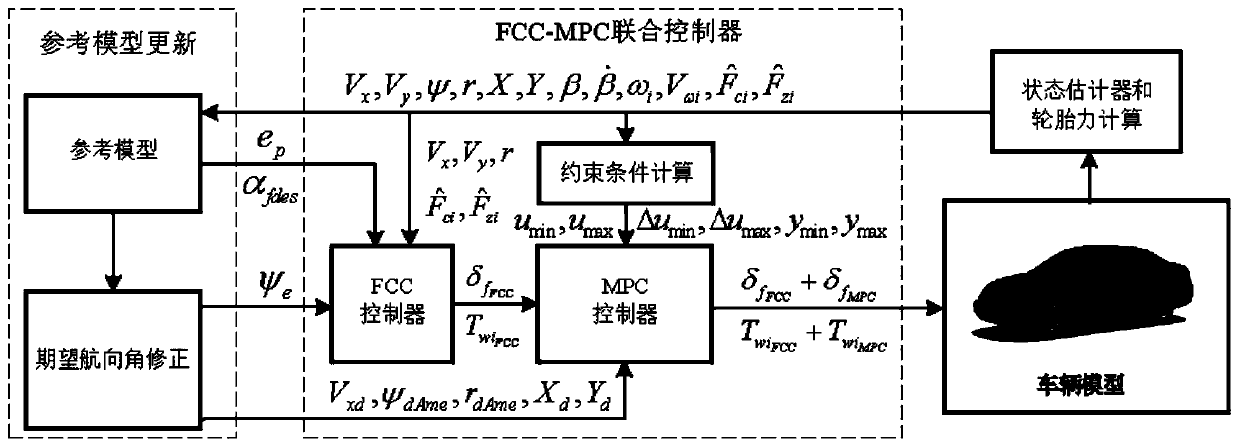
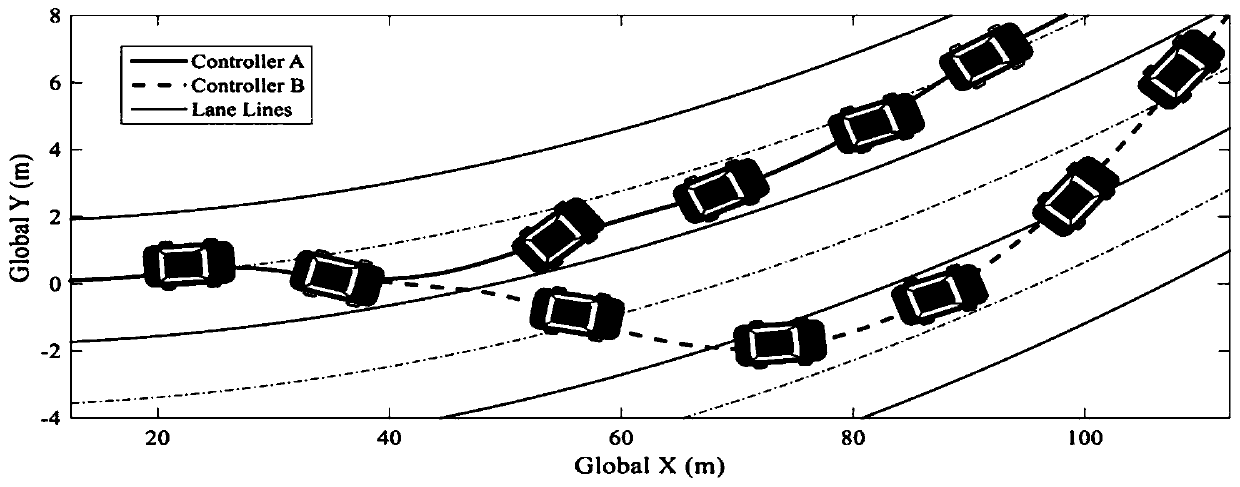
[0019] In order to realize the safe motion control of unmanned vehicles in the case of instability after a collision, the present invention proposes a joint motion control strategy of feedforward control and feedback control, using feedforward compensation for strong disturbances caused by collisions and feedback processing The optimization problem with constraints can solve the problems of control time lag, small control feasible region and small applicability to collision situations in traditional methods that only use feedback control. The feasibility and control effect of the method of the present invention are verified by simulation software. The planar dynamics model of the distributed drive unmanned vehicle is shown in Fig. figure 1 shown. where F lij represents the longitudinal driving force of the wheels of the mobile robot, F ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More