

Cable rod telescoping mechanism for controlling deformation of tensioning integral structure
A technology of tensioning the overall structure and telescopic mechanism, which is applied in the direction of program-controlled manipulators, manipulators, motor vehicles, etc., can solve the problem that the tension resistance of the rope and the compression resistance of the rod can not be combined, so as to improve the versatility and scope of application. The effect of compressive resistance and rigidity improvement of rods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The following will clearly and completely describe the technical solutions in the embodiments of the present disclosure with reference to the drawings in the embodiments of the present disclosure. It should be understood that the specific embodiments described here are only used to explain the present disclosure, not to limit the present disclosure. Based on the embodiments of the present disclosure, all other embodiments obtained by those skilled in the art without creative efforts shall fall within the protection scope of the present disclosure.
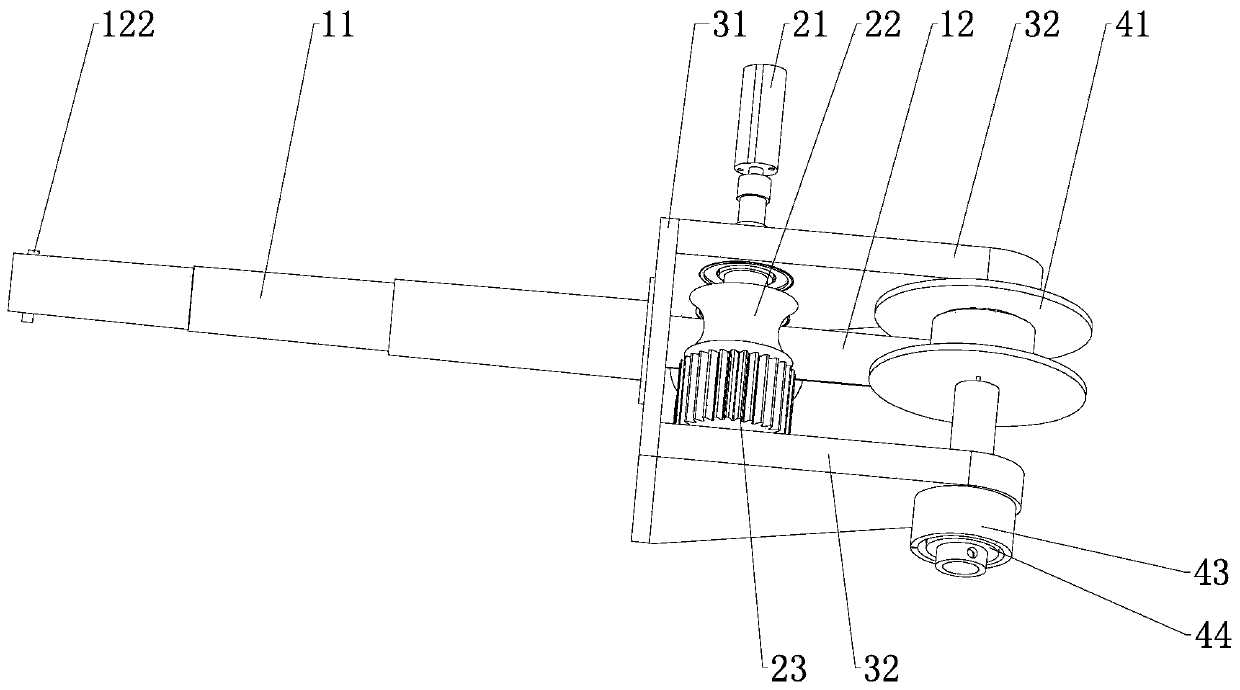
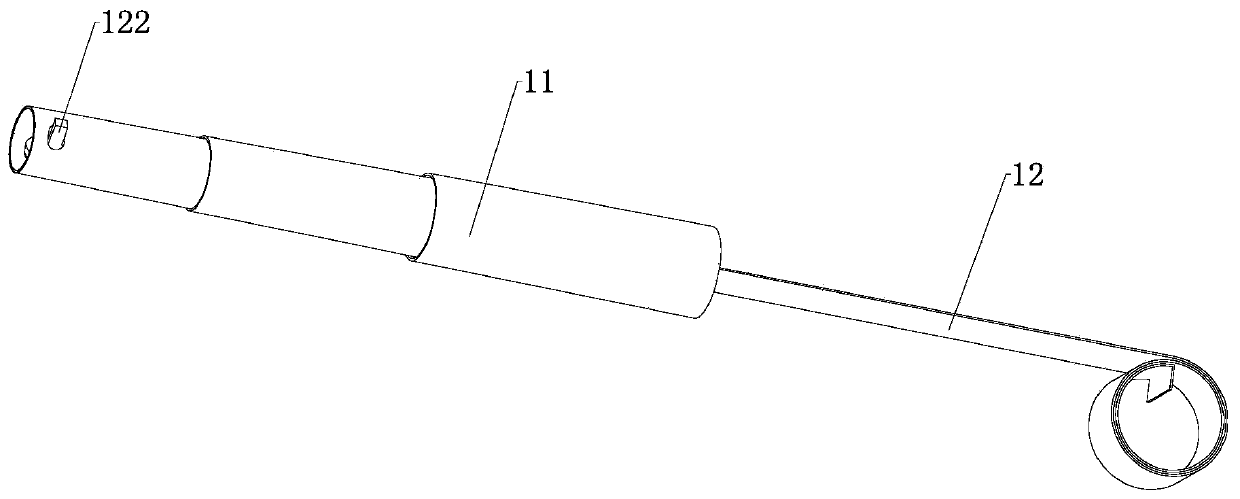
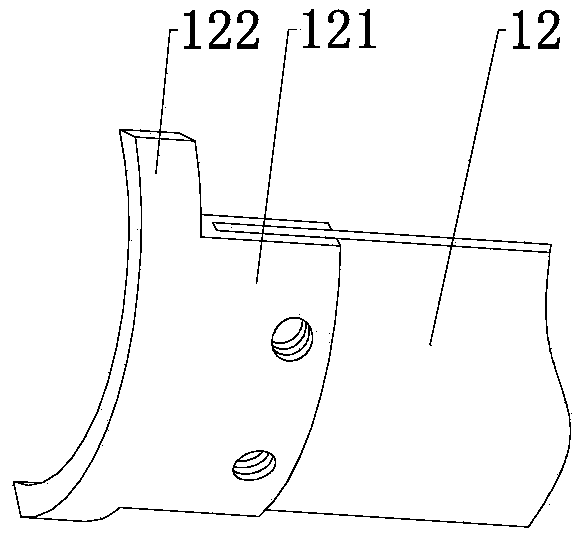
[0040] refer to Figure 1 to Figure 5 , the present embodiment discloses a cable-rod telescopic mechanism for controlling the deformation of a tensioned overall structure, including: a telescopic execution module, a gear tension wheel drive module, a volute spring reel module and a mounting frame.
[0041] refer to figure 1 , figure 2 and image 3 , the telescopic execution module includes a telescopic sleeve 11 and a s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More