Dynamic fractional-order sliding mode control method of micro-gyroscope with double feedback fuzzy neural network
A technology of fuzzy neural network and fractional sliding mode, which is applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problem of poor control accuracy of micro gyroscope, high processing accuracy of micro gyroscope, performance Susceptible to problems such as machining accuracy, to achieve the effect of improving online identification efficiency, realizing online automatic tuning, and improving control performance and control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solutions of the present invention more clearly, and cannot be used to limit the protection scope of the present invention.
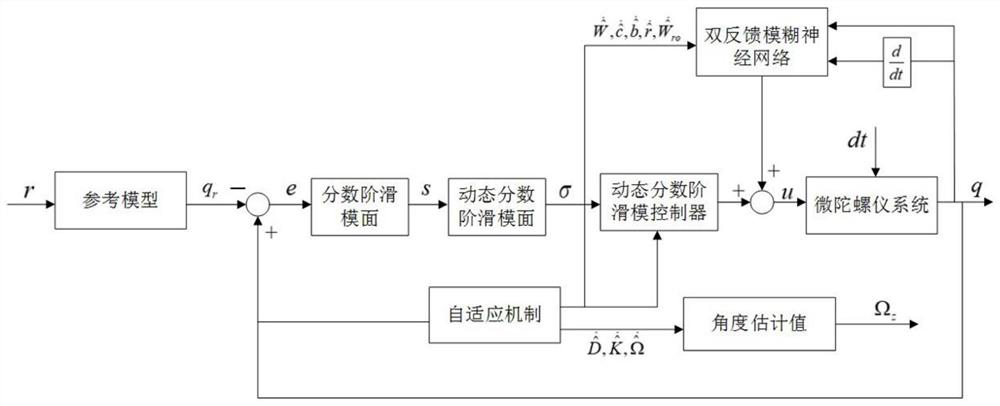
[0051] The specific embodiment of the present invention provides a dual-feedback fuzzy neural network dynamic fractional sliding mode control method for a micro-gyro, comprising the following steps:
[0052] The first step is to establish a mathematical model of the micro-gyroscope.
[0053] The driving mode and detection mode of the micro-gyroscope are regarded as a "spring-mass-damping" second-order system. First, the rotating coordinate system of the dynamic model is established; then, the basic dynamic model of the micro-gyroscope driving mode and detection mode is established based on the rotating coordinate system.
[0054] The established rotation coordinate system is as fol...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More