

Cruise formation planning system for multi-target communication unmanned aerial vehicles based on secondary clustering
A technology of quadratic clustering and planning system, applied in control/adjustment system, 3D position/channel control, non-electric variable control, etc., can solve the problem of sending out, difficult to guarantee all data, lack of reasonable planning of UAV route, etc. problems, to achieve the effect of fast response and short planning time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
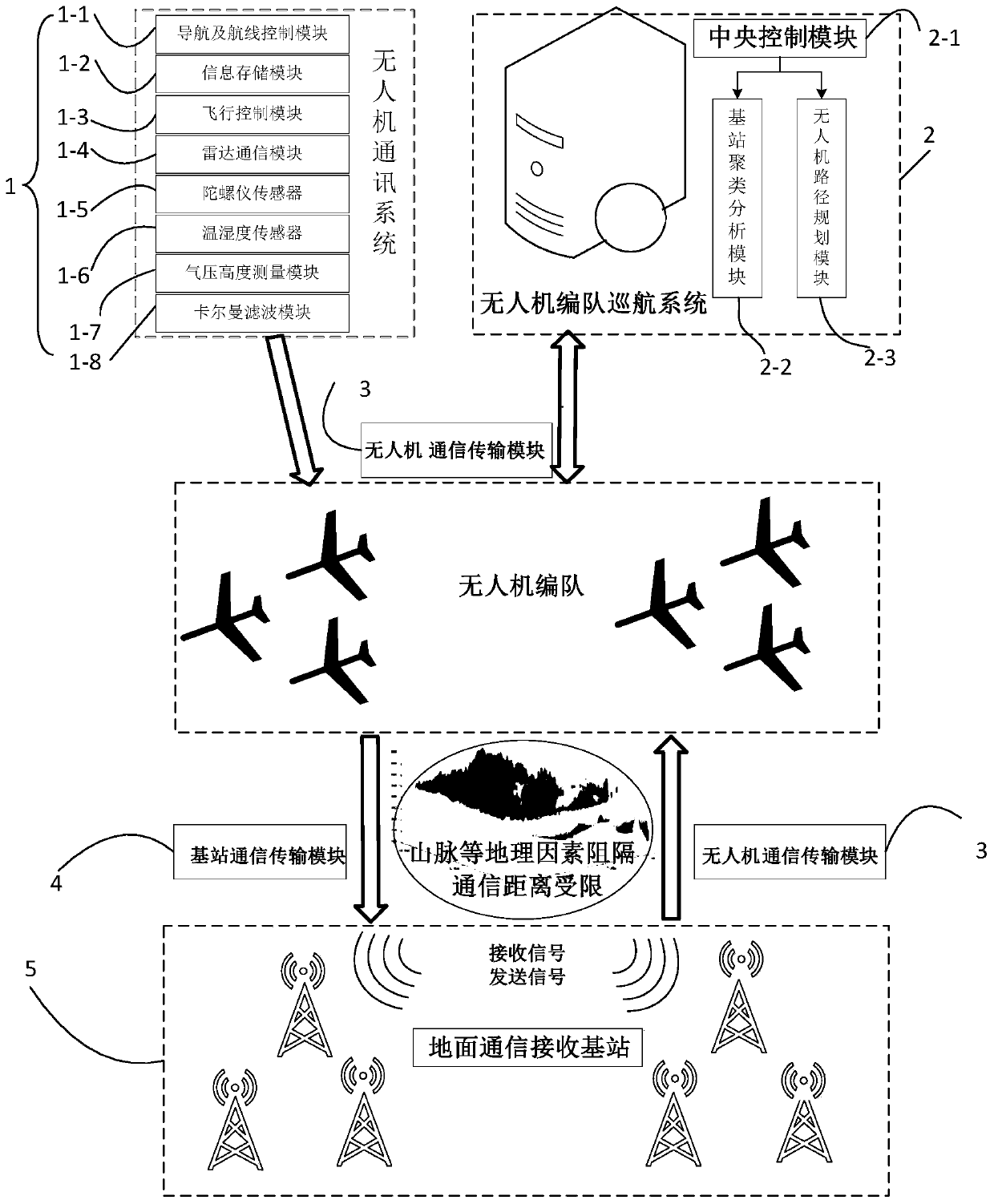
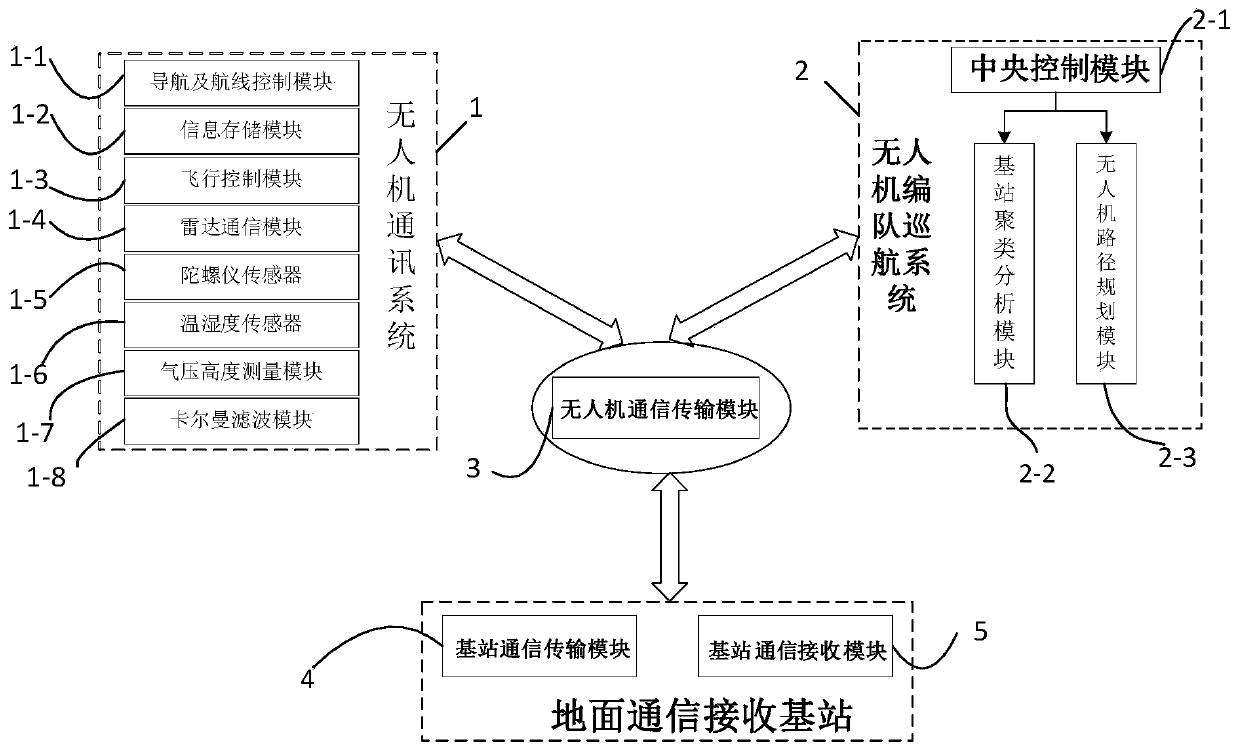
[0034] Specific implementation mode one: refer to figure 1 and image 3 Specifically explain this embodiment, the cruising formation planning system of multi-target communication UAV based on secondary clustering described in this embodiment, the system includes a ground communication receiving base station, and the system also includes UAV communication system 1 and UAV formation cruise system 2,
[0035] The UAV formation cruising system 2 includes a central control module 2-1, a base station cluster analysis module 2-2 and a UAV path planning module 2-3,
[0036] The drone communication system 1 is set on the drone,
[0037] The central control module 2-1 is used to store the data to be transmitted by each drone and the base station bandwidth for each drone to communicate with the ground communication receiving base station. The communication is obtained according to the base station bandwidth and the internally designed communication verification system. The amount of d...
specific Embodiment approach 2
[0048] Specific embodiment 2: This embodiment is a further description of the cruise formation planning system of the multi-target communication UAV based on secondary clustering described in the specific embodiment 1. In this embodiment, the UAV communication system 1 includes Navigation and route control module 1-1, information storage module 1-2, flight control module 1-3, radar communication module 1-4, gyroscope sensor 1-5, temperature and humidity sensor 1-6, barometric altitude measurement module 1- 7 and Kalman filter modules 1-8,
[0049] The navigation and route control module 1-1 is used to collect the position information of the drone in real time, and feed the information back to the central control module 2-1;
[0050] The information storage module 1-2 is used to receive and store the data to be transmitted from the central control module 2-1, and transmit the data to the corresponding group of ground communication receiving base stations;
[0051] The flight c...
specific Embodiment approach 3
[0059] Specific embodiment three: This embodiment is to further explain the cruise formation planning system of the multi-target communication UAV based on secondary clustering described in specific embodiment two. In this embodiment, the system also includes unmanned machine communication transmission module 3,
[0060] The UAV communication transmission module 3 is arranged on the UAV communication transmission module 3,
[0061] The UAV communication system 1 communicates with the central control module and the ground communication receiving base station respectively through the UAV communication transmission module 3 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More