

Robot remote control method and human body bounding box determination method and system
A technology for remote control and determination of methods, applied in instruments, computer parts, calculations, etc., can solve problems such as time-consuming calculation, complex calculation process, misjudgment rate, etc., to ensure accuracy and real-time performance, and improve recognition accuracy. performance, reducing the effect of delay
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
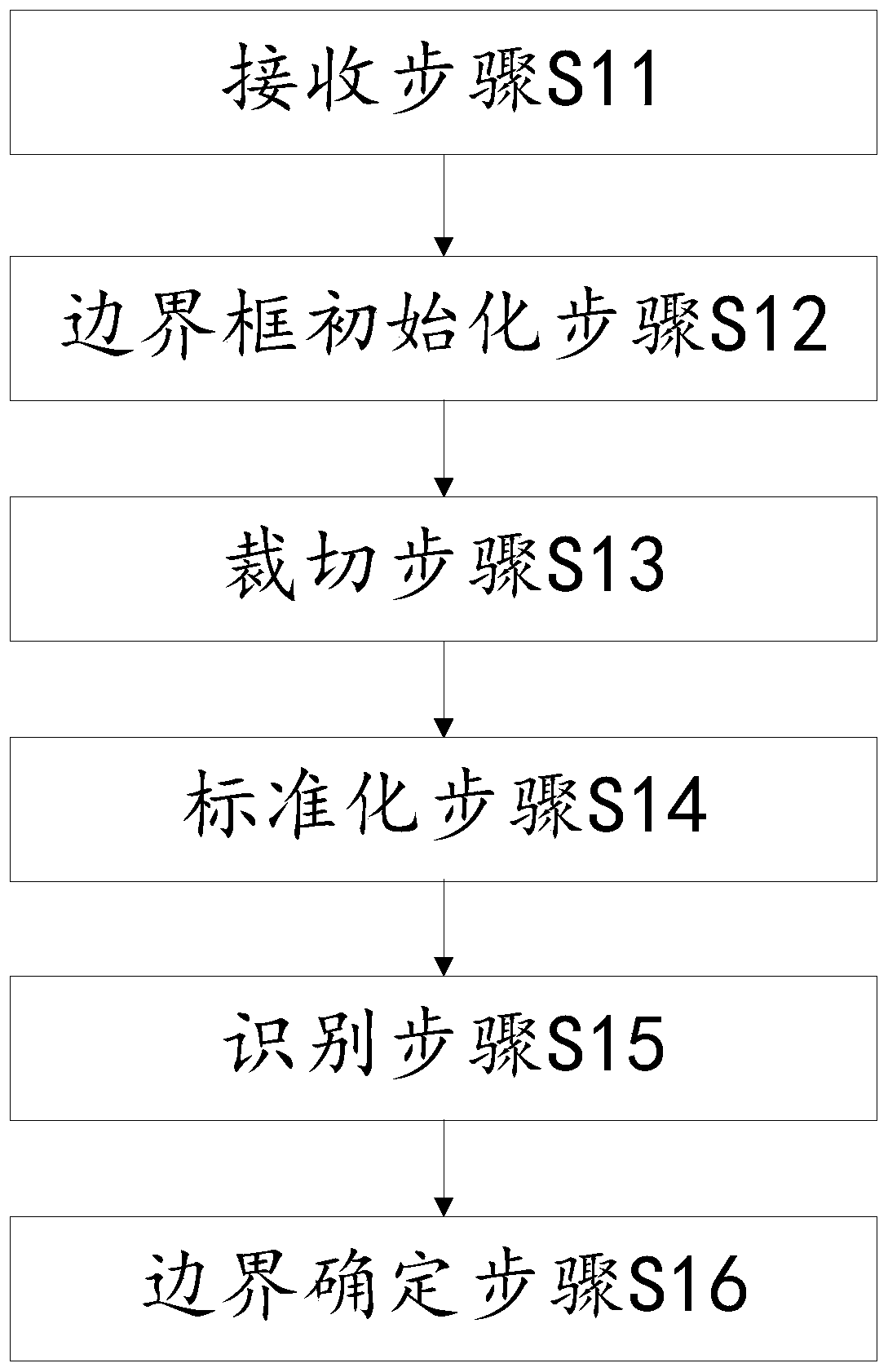
[0035] Such as figure 1 As shown, the method for determining the bounding box of a human body in a video image of the present invention is used to determine the bounding box of a human body in images captured continuously in multiple frames of video data, thereby constructing a real-time human body detector, which specifically includes receiving step S11, boundary Frame initialization step S12, cropping step S13, standardization step S14, recognition step S15 and boundary determination step S16, the specific process is as follows:
[0036] Receiving step S11, receiving video data shot in real time.
[0037] It mainly refers to the data obtained by the camera installed on the shooting site. The installation position and viewing angle of the camera are specifically based on the requirements of the human body pose estimation network model used for training samples. In this embodiment, a monocular camera is used. To shoot, and to shoot the video data of the human body going strai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More