Trend-aware robot trajectory planning method in dynamic environment
A dynamic environment and trajectory planning technology, applied in the field of robotics, can solve the problems of trajectory planning of motion obstacles, imprecise perception, limited perception accuracy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, not to limit the present application.
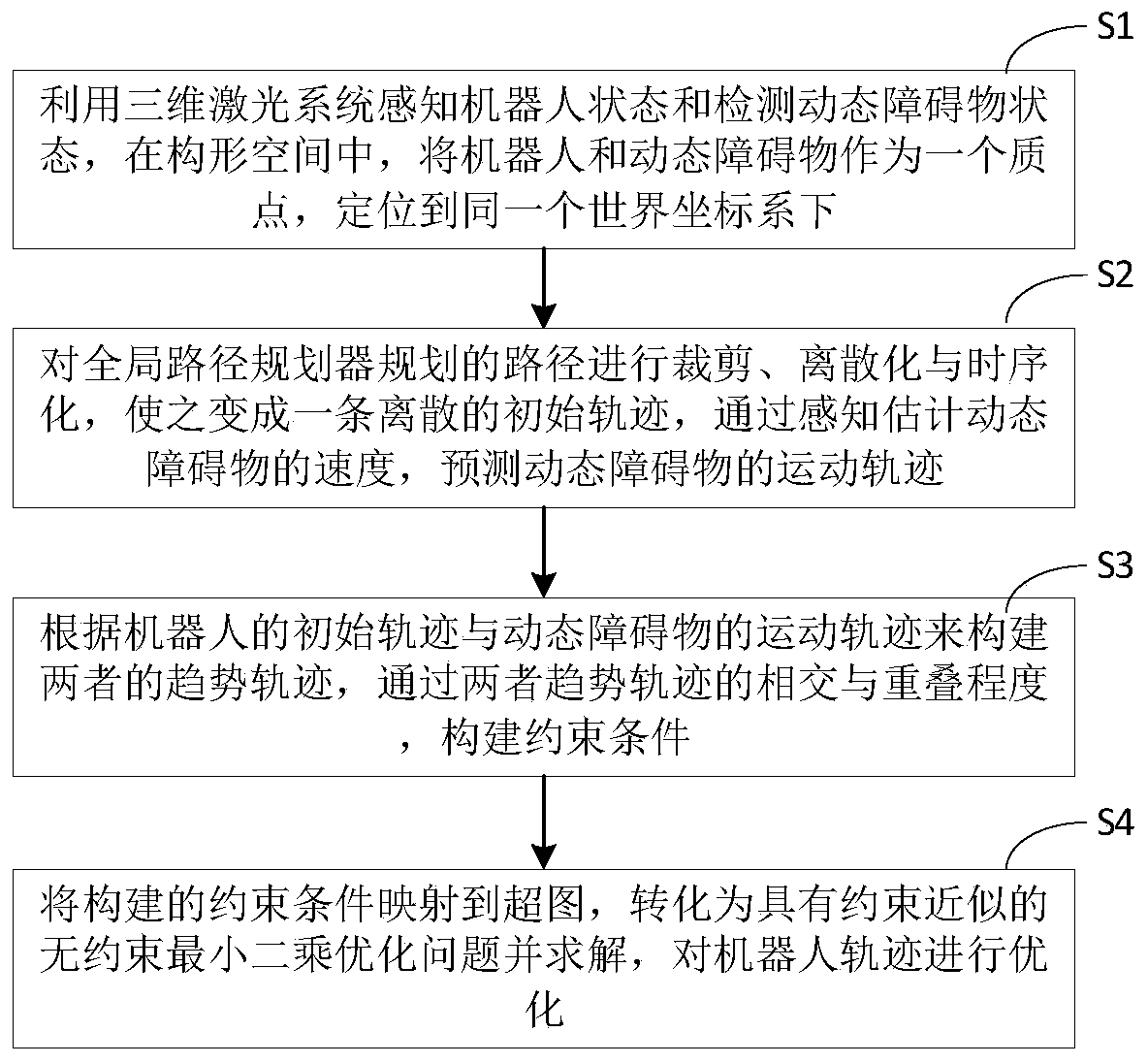
[0053] Such as figure 1 As shown, an embodiment of a trend-aware robot trajectory planning method in a dynamic environment is provided, including:
[0054] Step S1, using the three-dimensional laser system to perceive the state of the robot and detect the state of the dynamic obstacle, and in the configuration space, the robot and the dynamic obstacle are regarded as a mass point and positioned in the same world coordinate system.
[0055] In this embodiment, a robot is deployed in a dynamic and unknown environment (it can also be other forms of robots, and this application does not limit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More