

Gesture depth image continuous detection method using multi-head mask balance fusion unit
A depth image and detection method technology, applied in neural learning methods, character and pattern recognition, biological neural network models, etc., can solve the problem that the single-frame gesture detection method cannot introduce timing and space dependencies at the same time, so as to improve continuity And stability and detection accuracy, improve stability, improve the effect of continuity and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
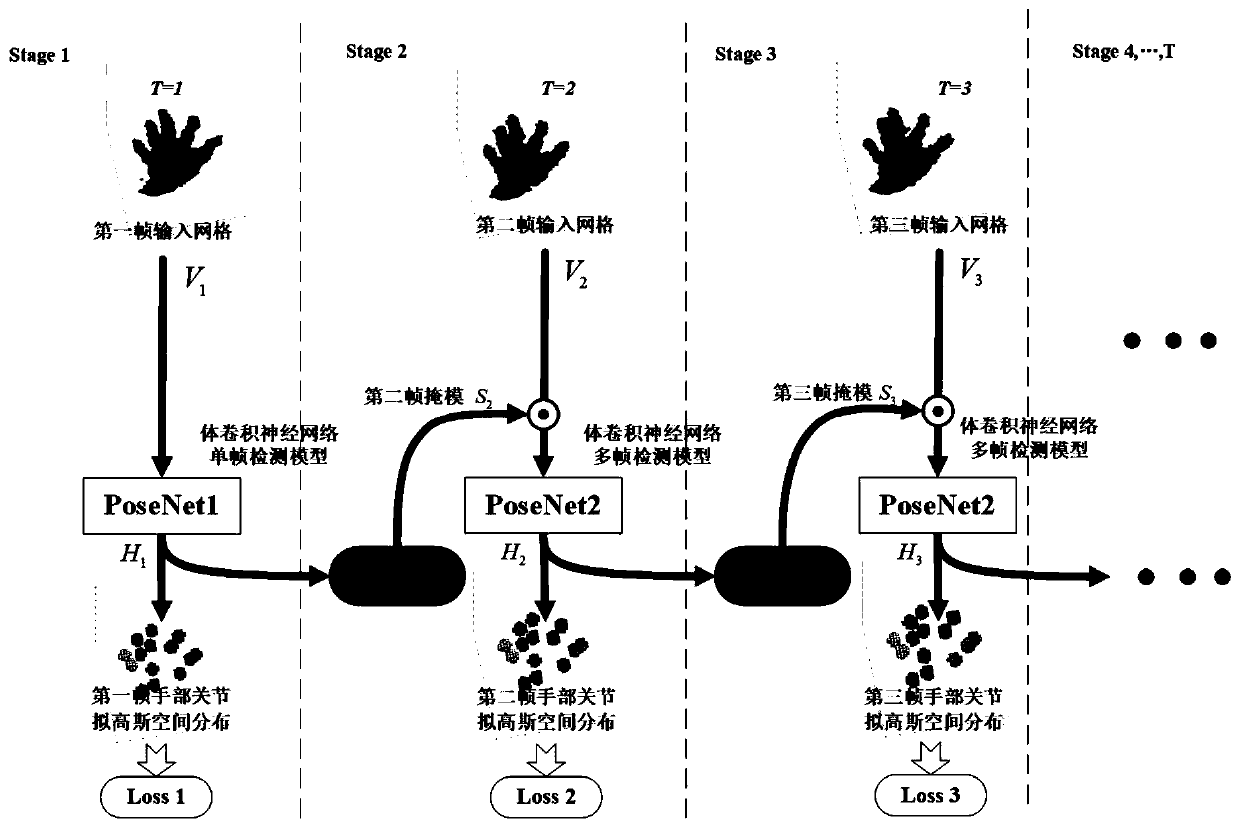
[0044] refer to figure 1 , according to the embodiment of the invention and the implementation process of the complete method of the present invention are as follows:
[0045] S1. Capture the depth image sequence of the dynamic changes of the human hand through the depth camera where D t Represents the depth image, T represents the image sequence, imgH and imgW represent the length and width of the image respectively, and the depth information stored in each pixel unit in the image is recorded as {z=D t (u,v)|u∈[0,imgH), v∈[0,imgW)}
[0046] S2 projects each frame of the depth image sequence into a 3D space point cloud For the correspondence between the pixels of each frame of depth image and the spatial point cloud, refer to the following calculation formul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More