

Selling commodity claiming mechanical hand
A technology of manipulators and commodities, applied in the field of manipulators, can solve the problems of increasing the overall size of the equipment, complicated programming, and high equipment costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings. It should be noted here that the descriptions of these embodiments are used to help understand the present invention, but are not intended to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below may be combined with each other as long as they do not constitute a conflict with each other.
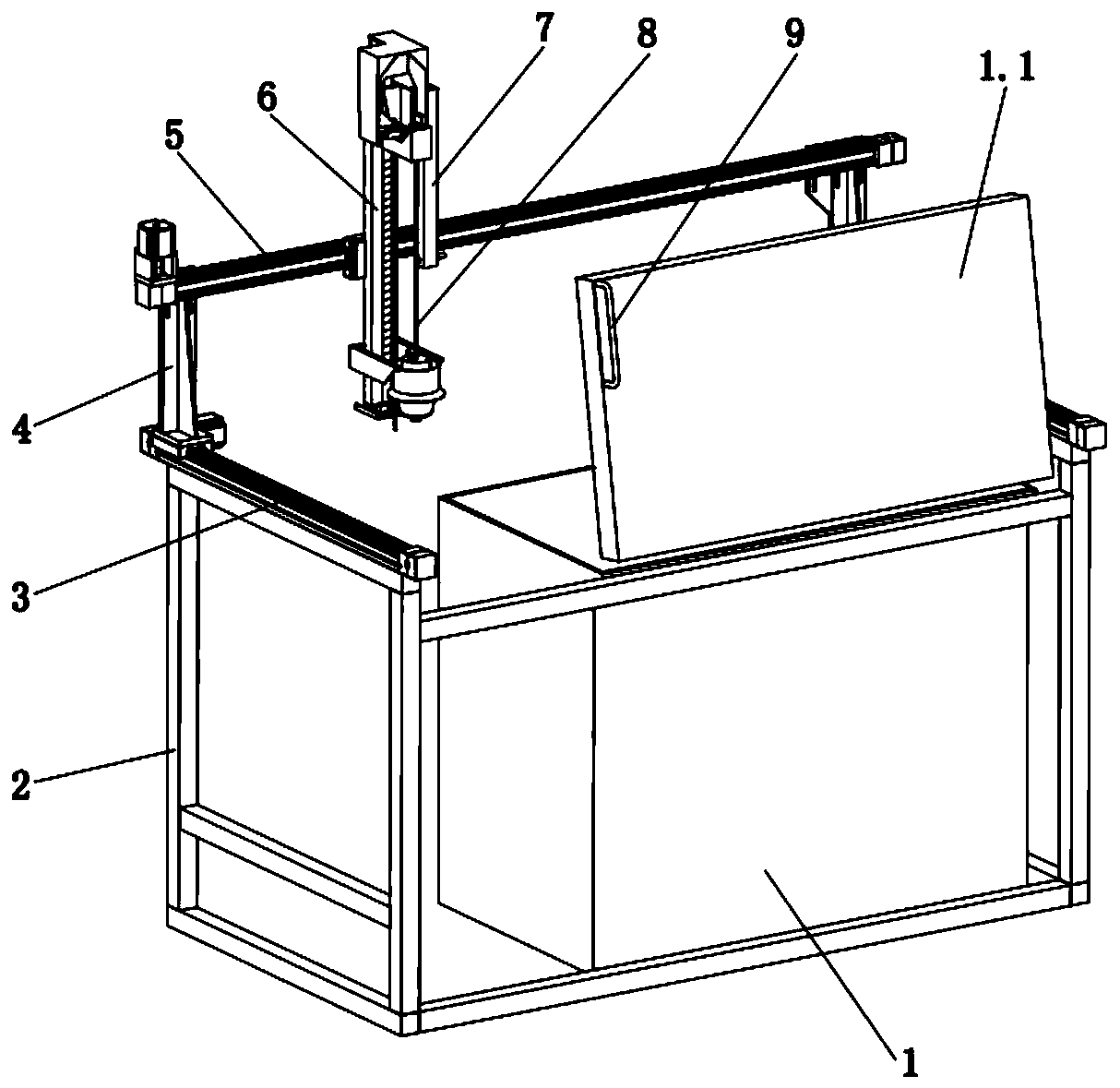
[0019] like figure 1 As shown, the manipulator for selling commodities is mainly composed of an X-axis mobile device 3 , a Y-axis mobile device 5 , a Z-axis lifting device 6 , a door opener 7 , a suction cup device 8 and a retractor 13 .
[0020] A frame 2 is arranged around the vending machine cabinet body 1, and a pair of X-axis mobile devices 3 arranged in parallel are laid on both sides of the frame 2. The X-axis action device uses a motor to drive the belt to driv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More