

Modular reconfigurable robot planning simulation method and system based on augmented reality
A technology for reconstructing robots and augmented reality, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of difficult to meet the requirements of fast and accurate planning of modular reconfigurable robots, prone to errors, and manufacturing waste. Achieve increased accuracy, improved speed and precision, and guaranteed simulation results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] In order to better understand the technical content of the present invention, specific embodiments are given together with the attached drawings for description as follows.
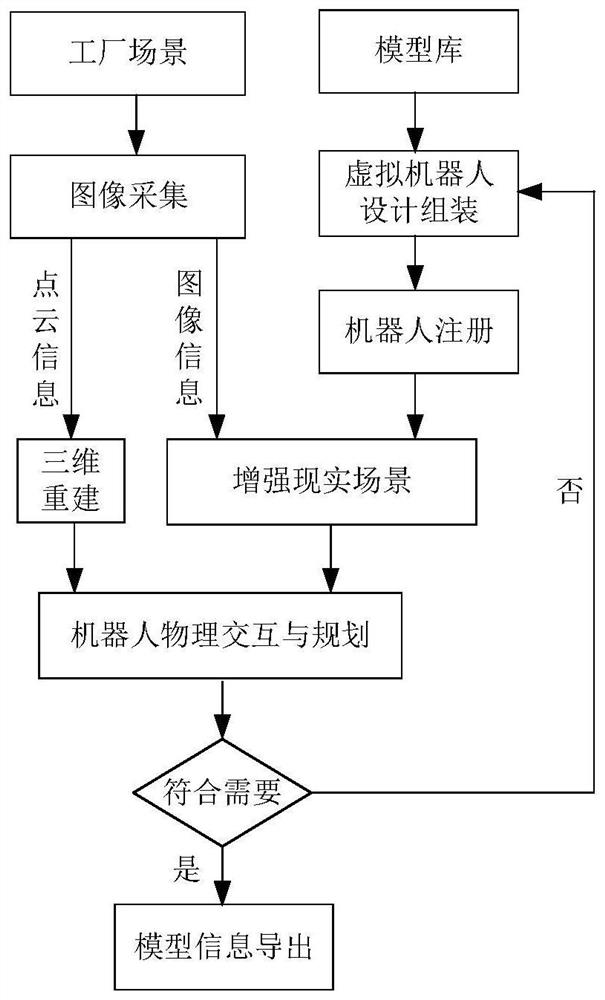
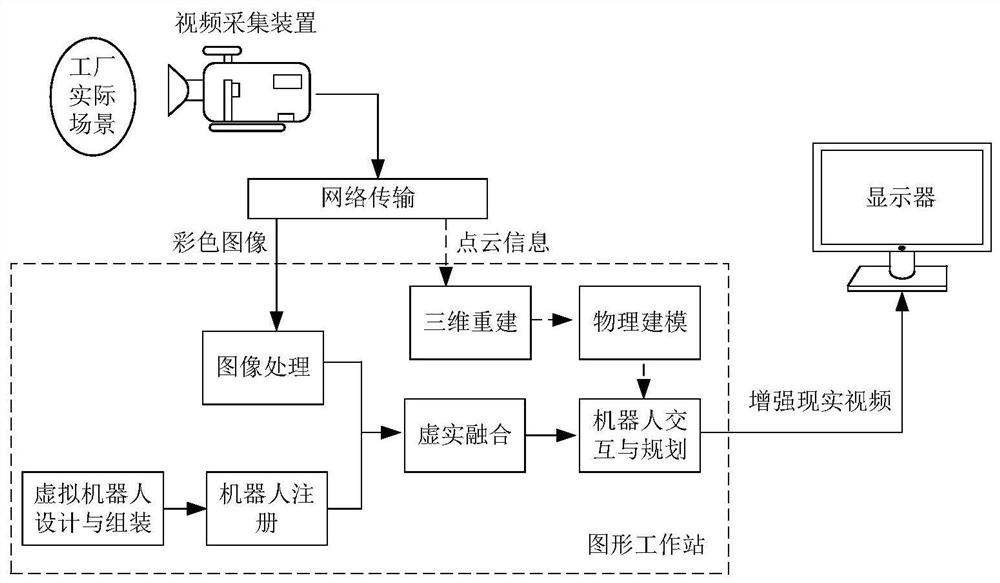
[0055] to combine figure 1 , the present invention proposes a reconfigurable modular robot planning simulation method based on augmented reality, the planning method comprising:
[0056] S1. Collect actual factory scene information, where the actual factory scene information includes image information and point cloud information.
[0057] S2, processing the collected image information to generate an actual scene image of the factory.
[0058] S3, process the collected point cloud information, identify and reconstruct the 3D model of the object in the actual scene of the factory, construct the 3D model of the factory, and assign the collision bounding box and physical attributes to the 3D model of the constructed object.
[0059] S4. According to the work requirements, select the corresponding mod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More