Mobile robot path planning method based on self-adaptive ant colony algorithm
A technology of mobile robot and ant colony algorithm, which is applied in the direction of instruments, navigation calculation tools, non-electric variable control, etc., can solve the problems of falling into local optimum, falling into local optimum solution, and algorithm stagnation, etc., and achieves fast convergence and search Strong optimal solution ability and smooth path trajectory
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be further described below in conjunction with the accompanying drawings.
[0055] The described method for path planning of a mobile robot based on the adaptive ant colony algorithm is realized through the following steps.
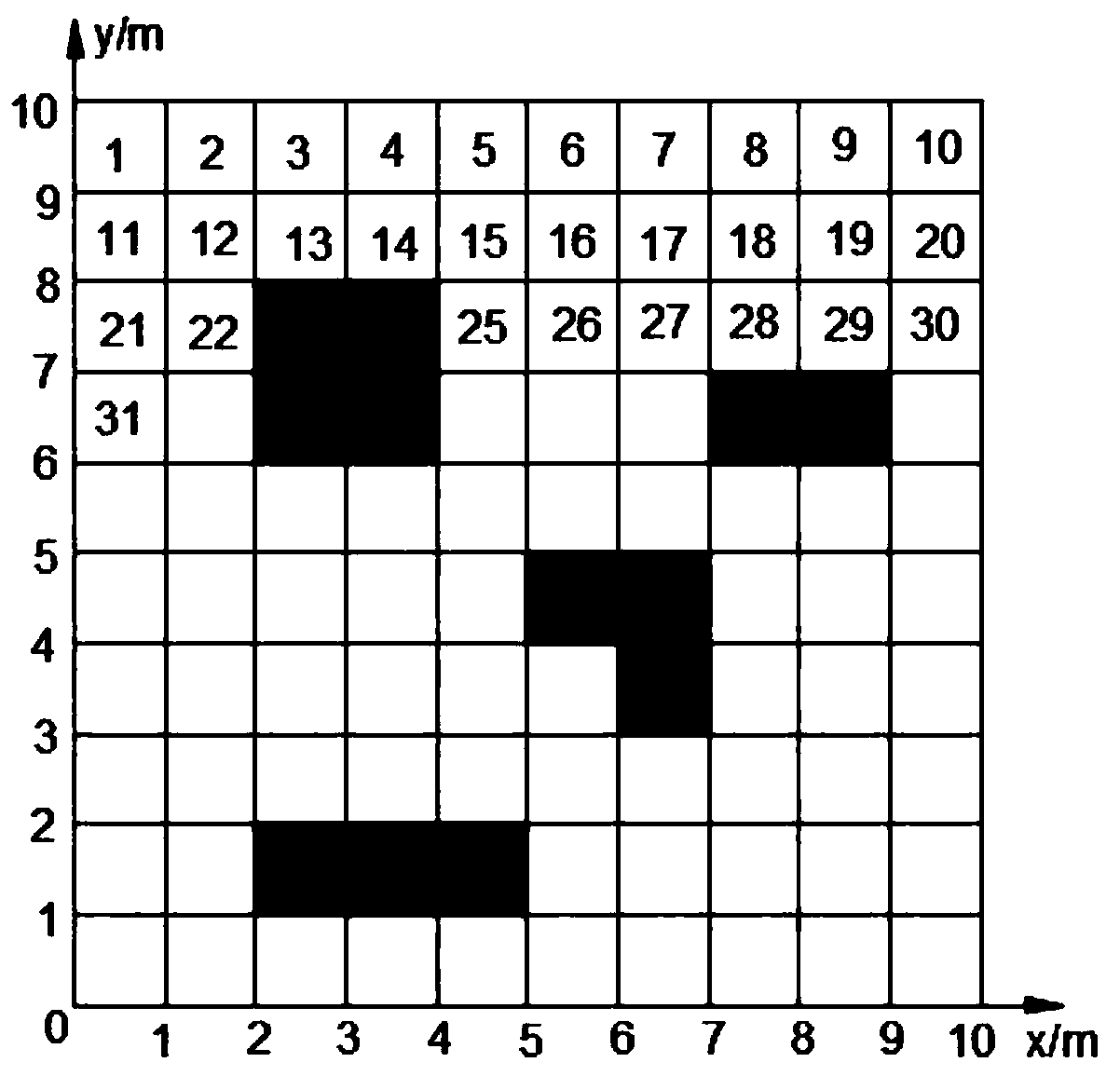
[0056] Step 1: Modeling with grid environment method. The working environment of the mobile robot is a two-dimensional static environment, assuming that the obstacle height is negligible and stationary. Because the grid method is simple and effective, and has strong adaptability to obstacles, it can greatly reduce the complexity of environmental modeling. Therefore, the present invention adopts the grid method to divide the working environment. The grid without obstacles is a free grid. In the simulation program It is represented by 0, and the grid with obstacles is an infeasible grid. In the simulation program, it is represented by 1. In order to prevent the robot from colliding with obstacles, the obstacles are properl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com