Six-freedom-degree parallel mechanism with reversible moving platform
A technology with degrees of freedom and moving platform, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of rare six-degree-of-freedom parallel mechanisms, limited rotational degrees of freedom of moving platforms, complex structures, etc., to achieve rich working methods, guarantee Workability, effect of reducing the number of branches
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0017] The six-degree-of-freedom parallel mechanism with reversible moving platform provided by the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
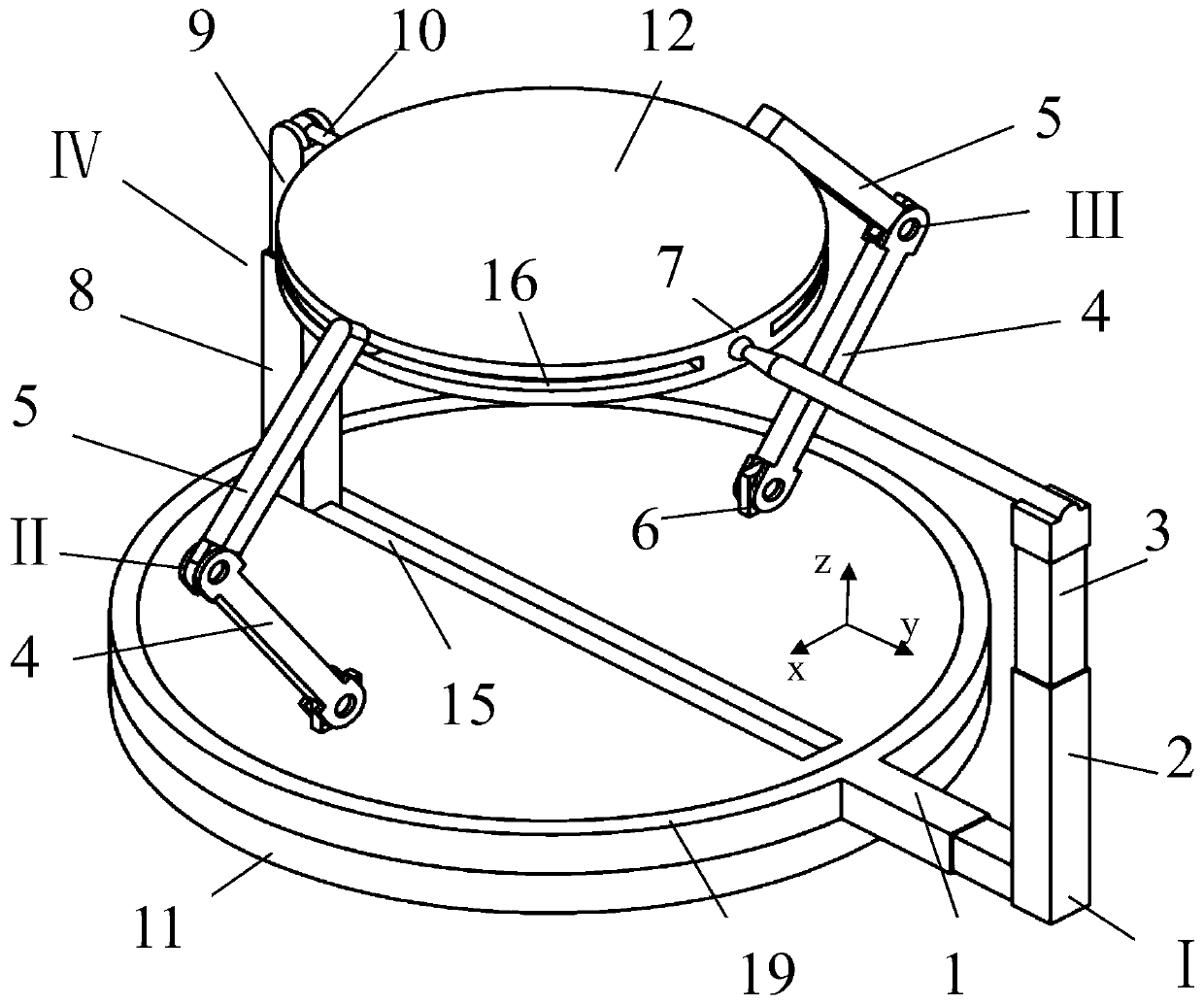
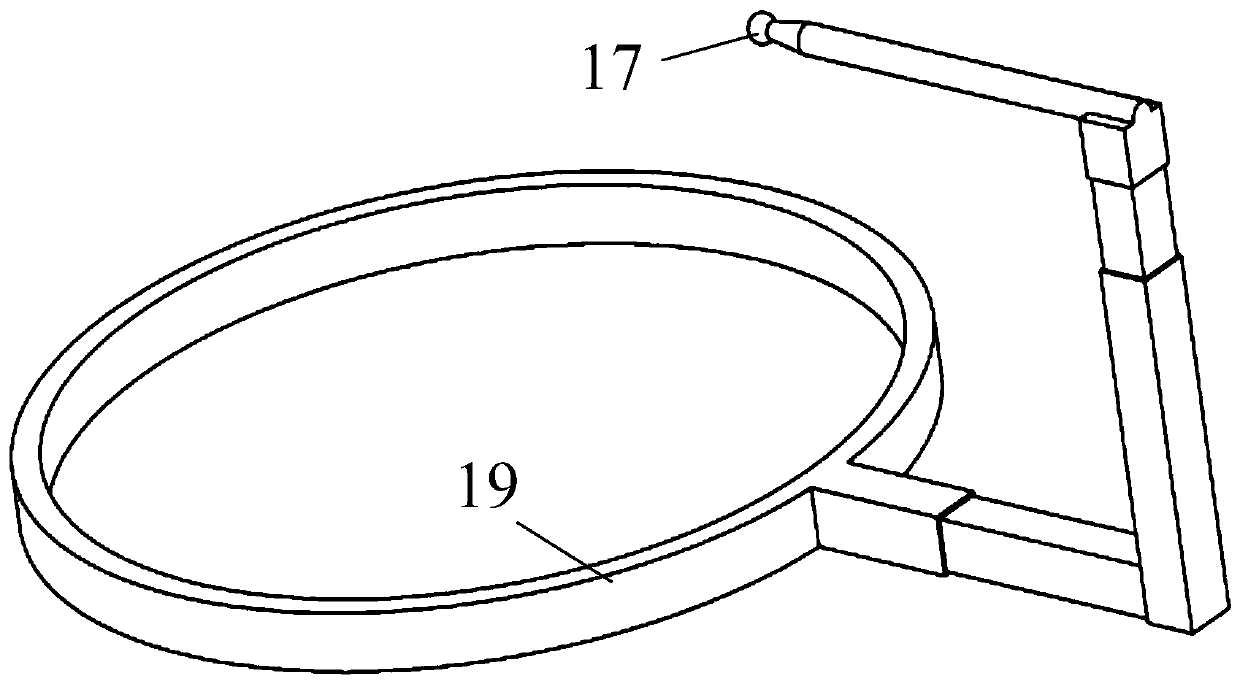
[0018] like figure 1 — Figure 5 As shown, the six-degree-of-freedom parallel mechanism with reversible moving platform provided by the present invention includes a fixed platform 11, a moving platform 12, a first branch chain I, a second branch chain II, a third branch chain III and a fourth branch chain IV; Wherein, the fixed platform 11 is a disc-shaped structure, the upper and lower parts of the outer circumference are stepped and arranged horizontally, and the middle part of the surface is sunken downward to form a radial chute 15; the moving platform 12 is a disc-shaped structure, Set above the fixed platform 11, the middle part of the circumferential surface is recessed inward to form a circumferential arc-shaped slide groove 16; the first branch ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com