

Cascaded wireless charging system of electric power inspection robot and control method
A power inspection and wireless charging technology, which is applied in the direction of current collectors, battery circuit devices, electric vehicles, etc., can solve the problems that it is difficult to realize the dynamic charging demand, and the plug-in charging is difficult to meet the intelligent inspection, so as to ensure dynamic wireless charging Efficiency, ease of replacement and maintenance, effect of improving transmission efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The specific implementation manner and working principle of the present invention will be further described in detail below in conjunction with the accompanying drawings.
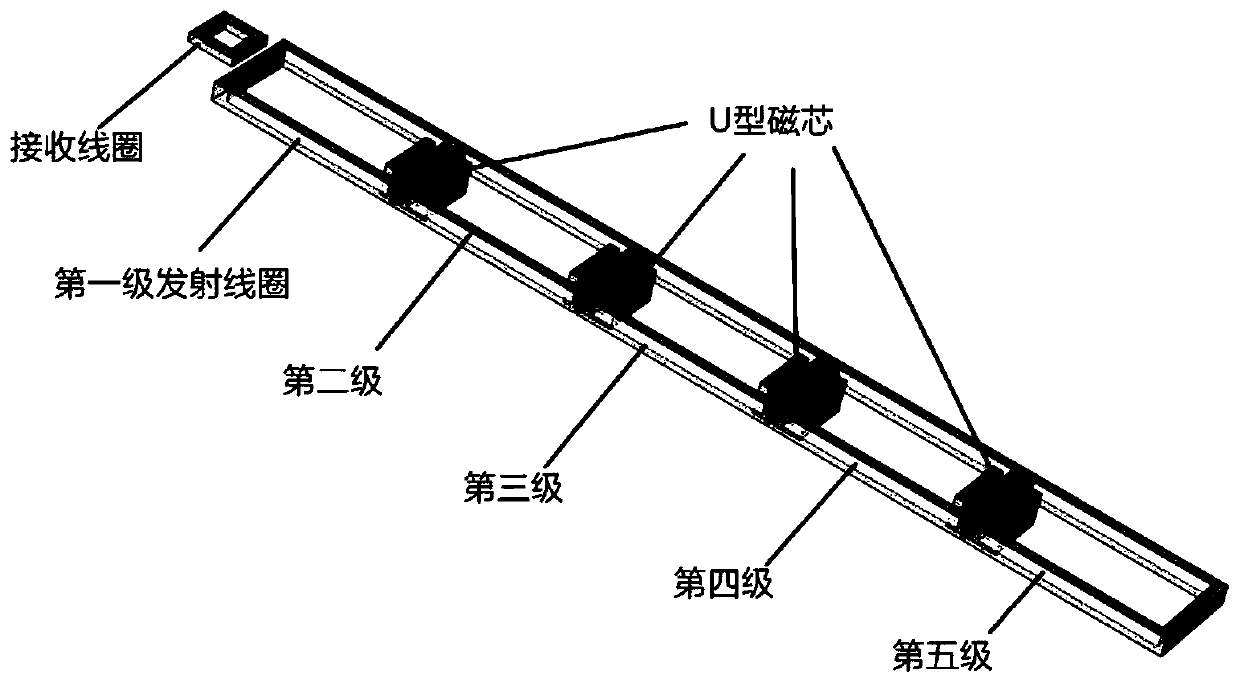
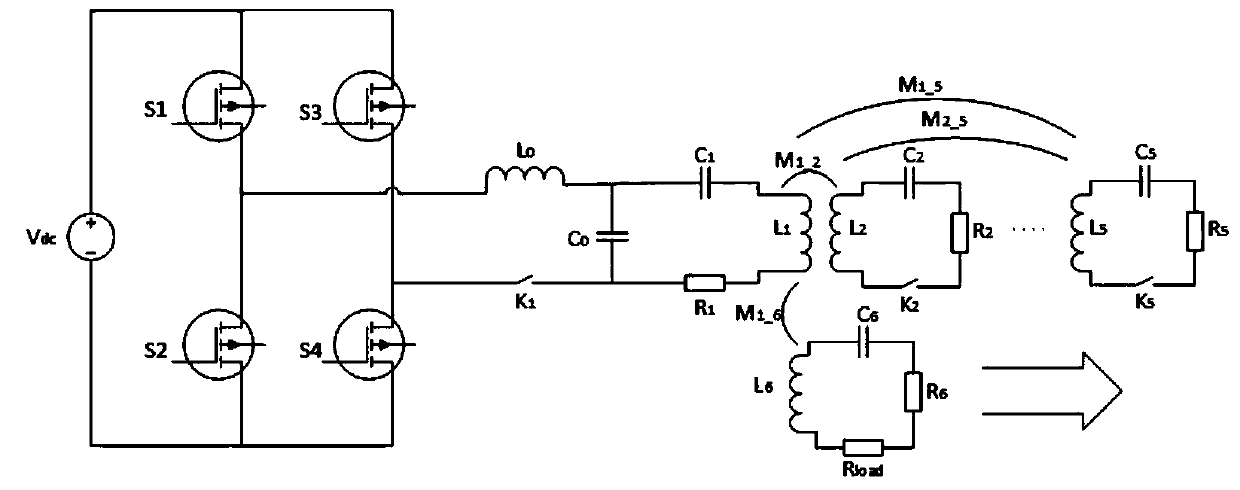
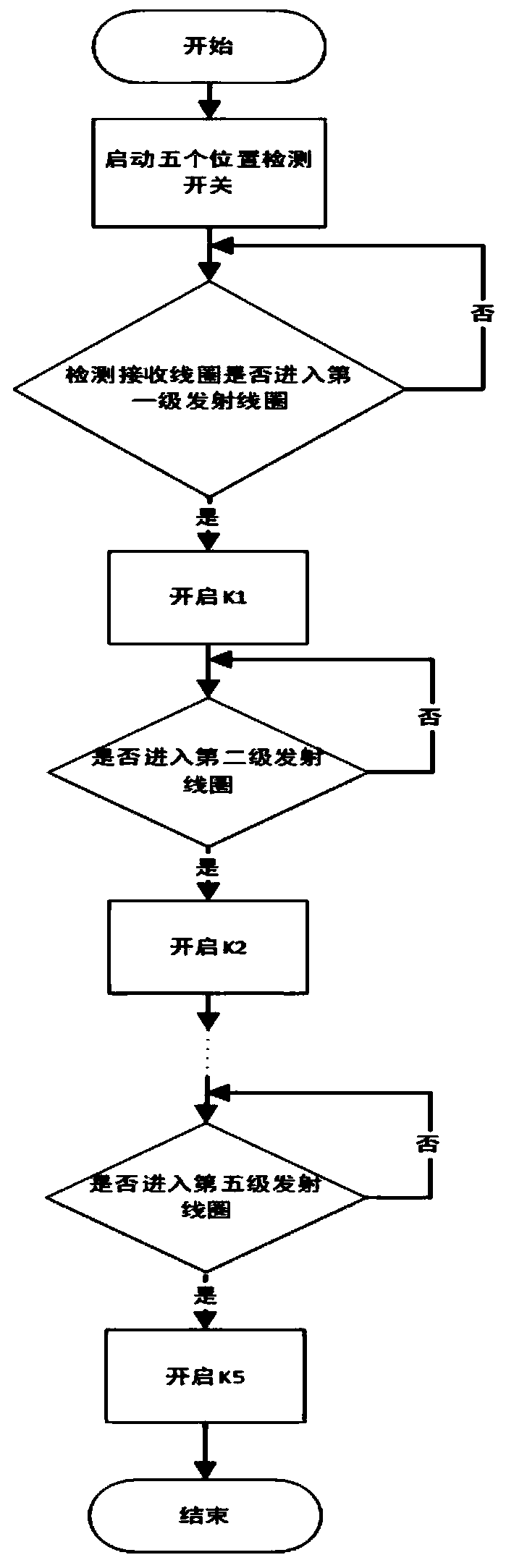
[0028] like figure 1 , figure 2 As shown, this embodiment provides a cascaded wireless charging system for power inspection robots. The inspection path of the original edge power inspection robot is laid with 5 levels of transmitting coils. Of course, the number can be set to be more, and each level of transmitting coils is rectangular. Each level of the transmitting coil is in the shape of a guide rail. Each level of transmitting coil is connected with its own compensation capacitor to form a first-level resonant circuit. The adjacent two-level transmitting coils are coupled by a U-shaped magnetic core. Relative to each level of resonant circuit It is equipped with a sensor for detecting whether the load enters and a power switch for controlling whether the resonant circuit is on or off. The first...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More