

Unmanned vehicle obstacle avoidance method and system based on obstacle configuration reconstruction
An obstacle, unmanned vehicle technology, applied in the field of obstacle avoidance methods and systems for unmanned vehicles based on obstacle configuration reconstruction, can solve the problem of inaccurate obstacle size estimation, and achieve real-time obstacle size and real-time estimation. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
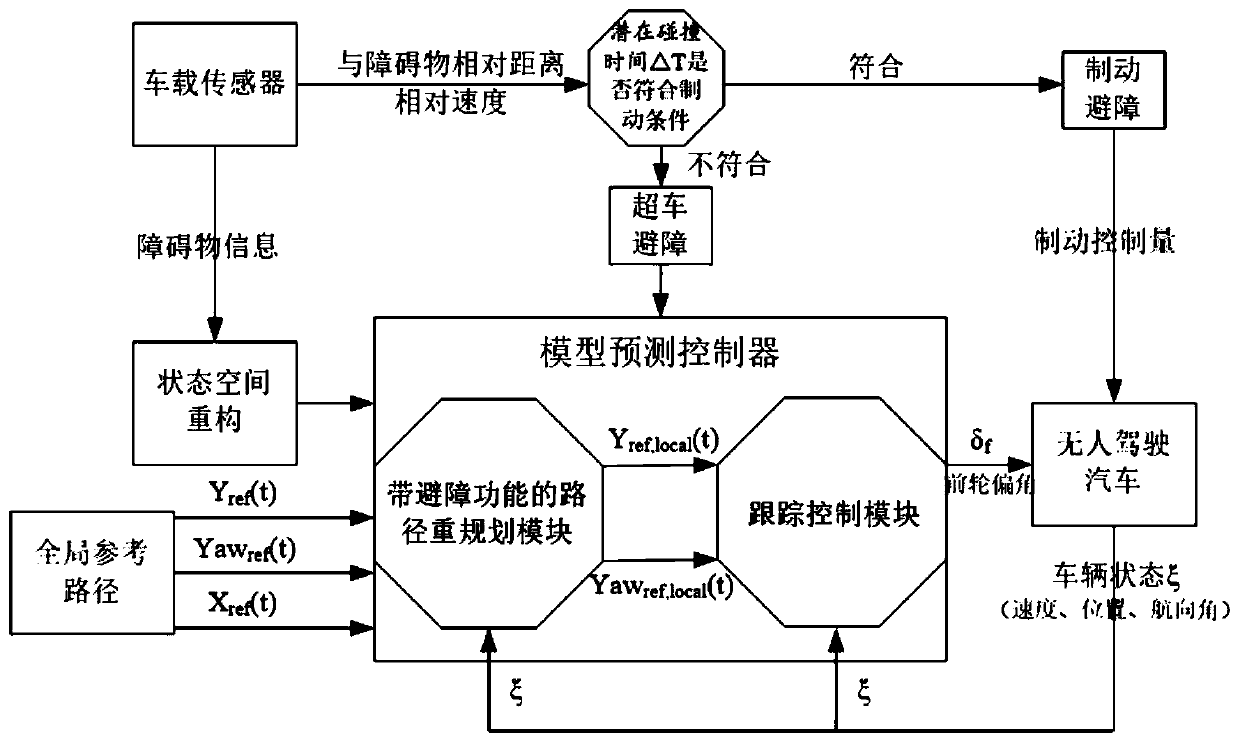
[0068] see Figure 1-Figure 6 , an unmanned vehicle obstacle avoidance method based on obstacle configuration reconstruction, including the following steps:
[0069] Step 1: According to the obstacle state information collected by the on-board sensor (relative distance and relative speed to the closest point of the obstacle), establish the △T potential collision time, set the braking conditions, and judge whether to perform braking obstacle avoidance or execute Overtaking and obstacle avoidance;
[0070] Specifically, step 1 specifically includes:
[0071] Step 1.1, according to the obstacle state information (relative distance and relative speed from the closest point to the obstacle) collected by the vehicle sensor (composed of long-distance millimeter-wave radar, short-distance millimeter-wave radar and visual camera sensor), calculate the potential collision time △ T controls the amount of braking, ie:
[0072]
[0073] Among them, △S is the relative distance to the ...
Embodiment 2
[0124] An unmanned vehicle obstacle avoidance system, comprising:
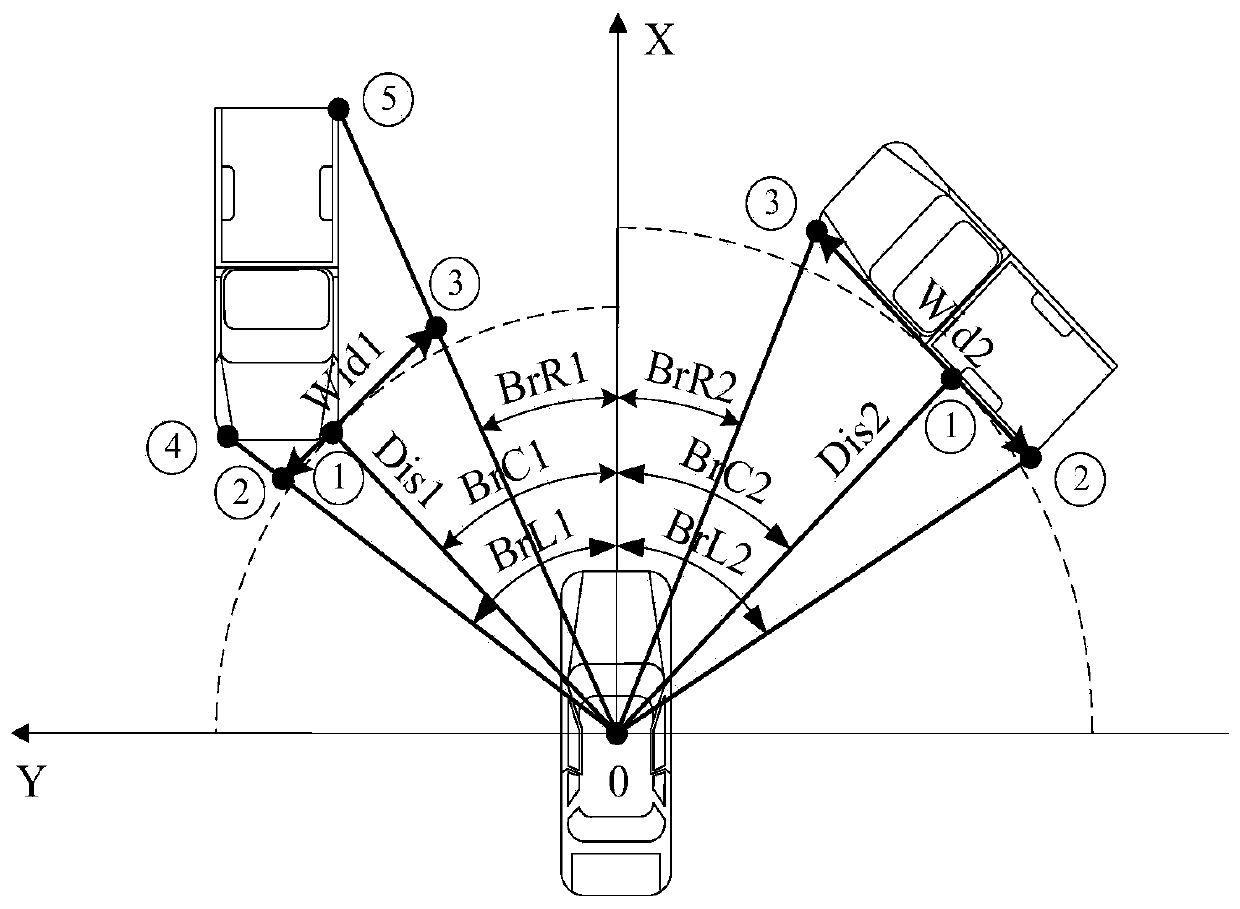
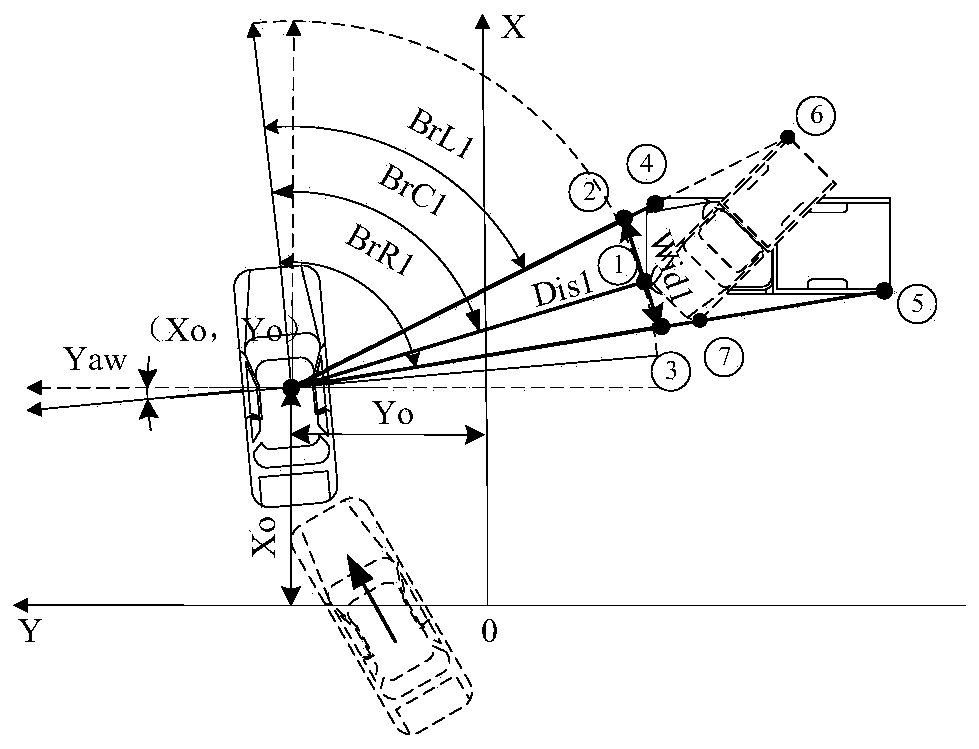
[0125] The configuration reconstruction module is used to reconstruct the obstacle data in the global coordinate system to obtain the reconstructed obstacle configuration information points;
[0126] The penalty function building module is used to establish the following penalty function when predicting the i-th time domain according to the reconstructed obstacle configuration information point: Among them, S obs is the weight coefficient; v is the relative speed between the unmanned vehicle and the obstacle; x m ,y m is the coordinate of the mth information point of the reconstructed obstacle configuration in the global coordinate system; x 0 ,y 0 is the coordinate of the unmanned vehicle in the global coordinate system; ζ is a positive number;
[0127] The objective function building module is used to set up the following objective function according to the penalty function:
[0128] Among them, J ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More