

Convenient pipe dredging robot
A robotic and tubular technology, applied in the direction of cleaning sewer pipes, cleaning hollow objects, cleaning methods and utensils, etc., can solve problems such as pipe wall damage, pipe damage, and inability to be taken away in time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
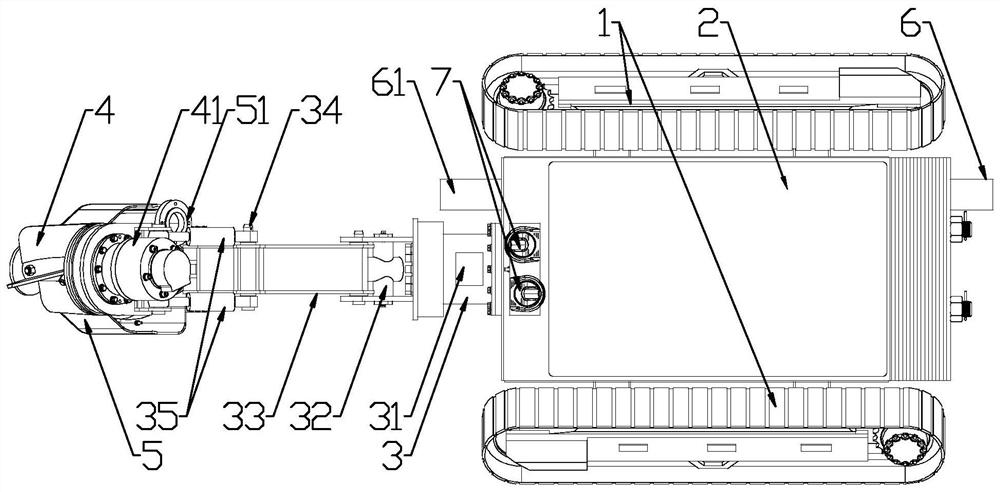
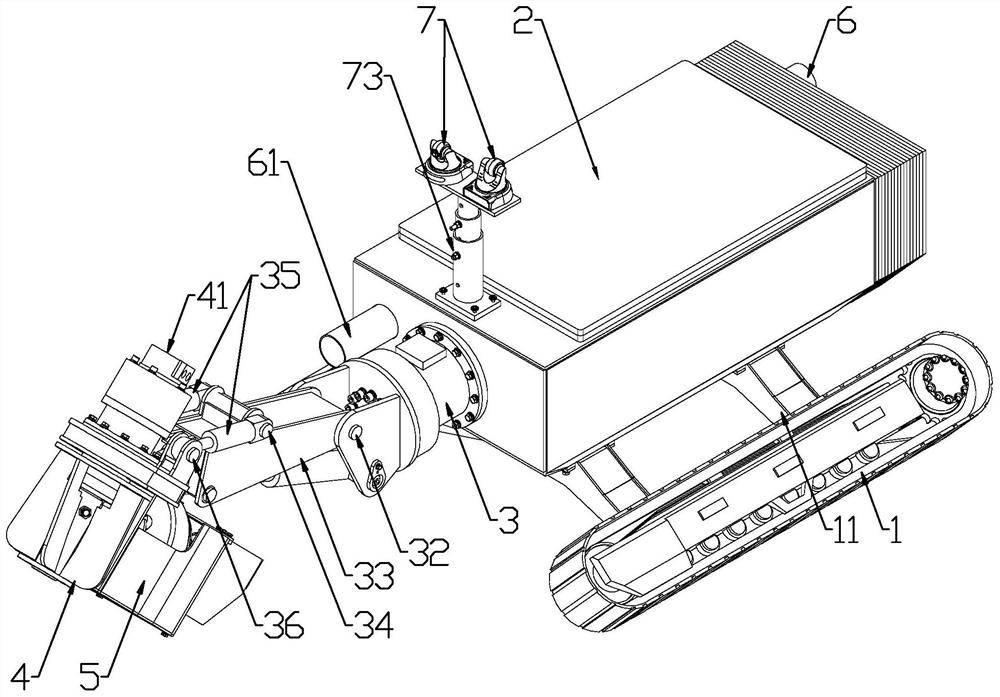
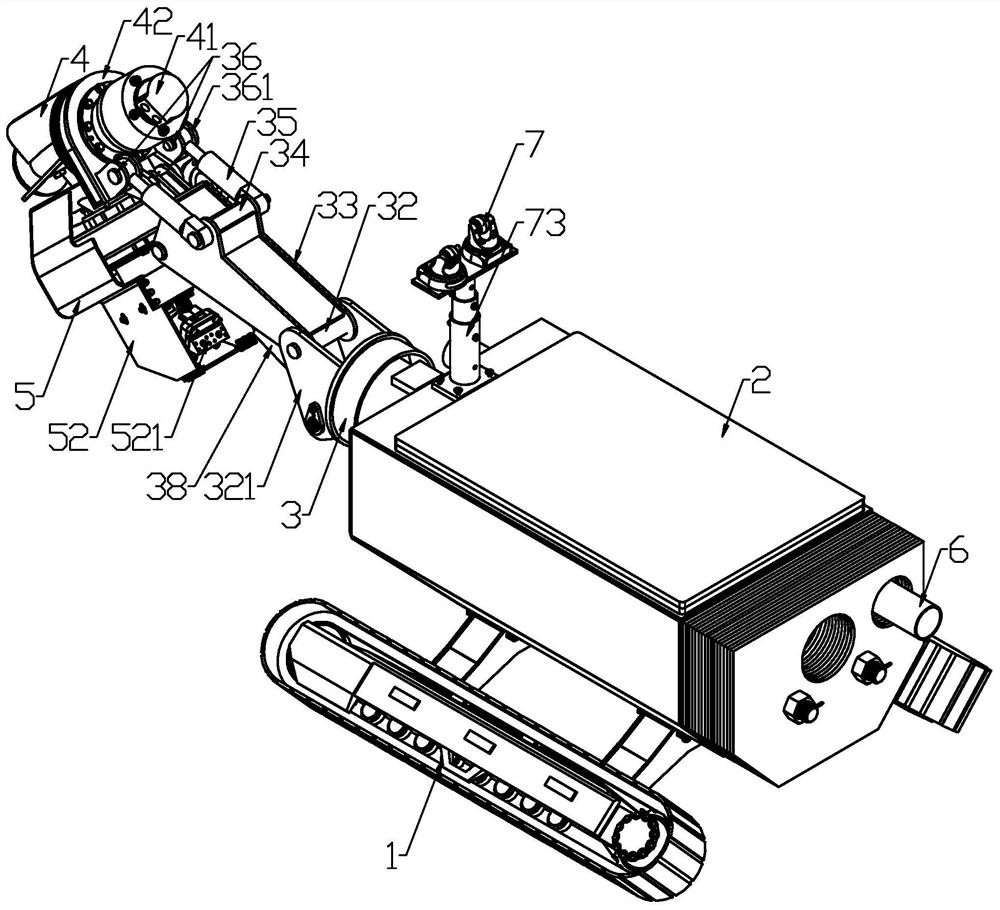
[0021] The convenient tubular dredging robot in this case, combined with figure 1 , figure 2 , image 3 , including crawler wheel 1, main shaft 3, rotary gear 4, mud suction groove 5, mud discharge port 6, central control (not shown in the figure), and camera unit 7 provided if necessary. Track wheels 1 are arranged in pairs, and the The walking drive (in the form of a motor, not shown in the figure) drives it to run, and the main shaft 3 is located on the track wheel 1, and is driven by the main shaft driver (in the form of a motor, not shown in the figure) ( Autorotation), a multi-stage telescopic arm is set between the main shaft 3 and the rotating gear 4, each telescopic arm is driven by a telescopic arm driver (such as a cylinder, a hydraulic cylinder, etc., not shown in the figure), the travel driver, the main shaft driver , the telescopic arm driver and the camera unit 7 are all connected to the central control, the camera unit 7 collects real-time sludge conditions ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More