

External parameter calibration method and device and electronic equipment
A calibration method and equipment technology, applied in the field of environmental perception of multi-sensor fusion, can solve problems such as errors in environmental perception fusion results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
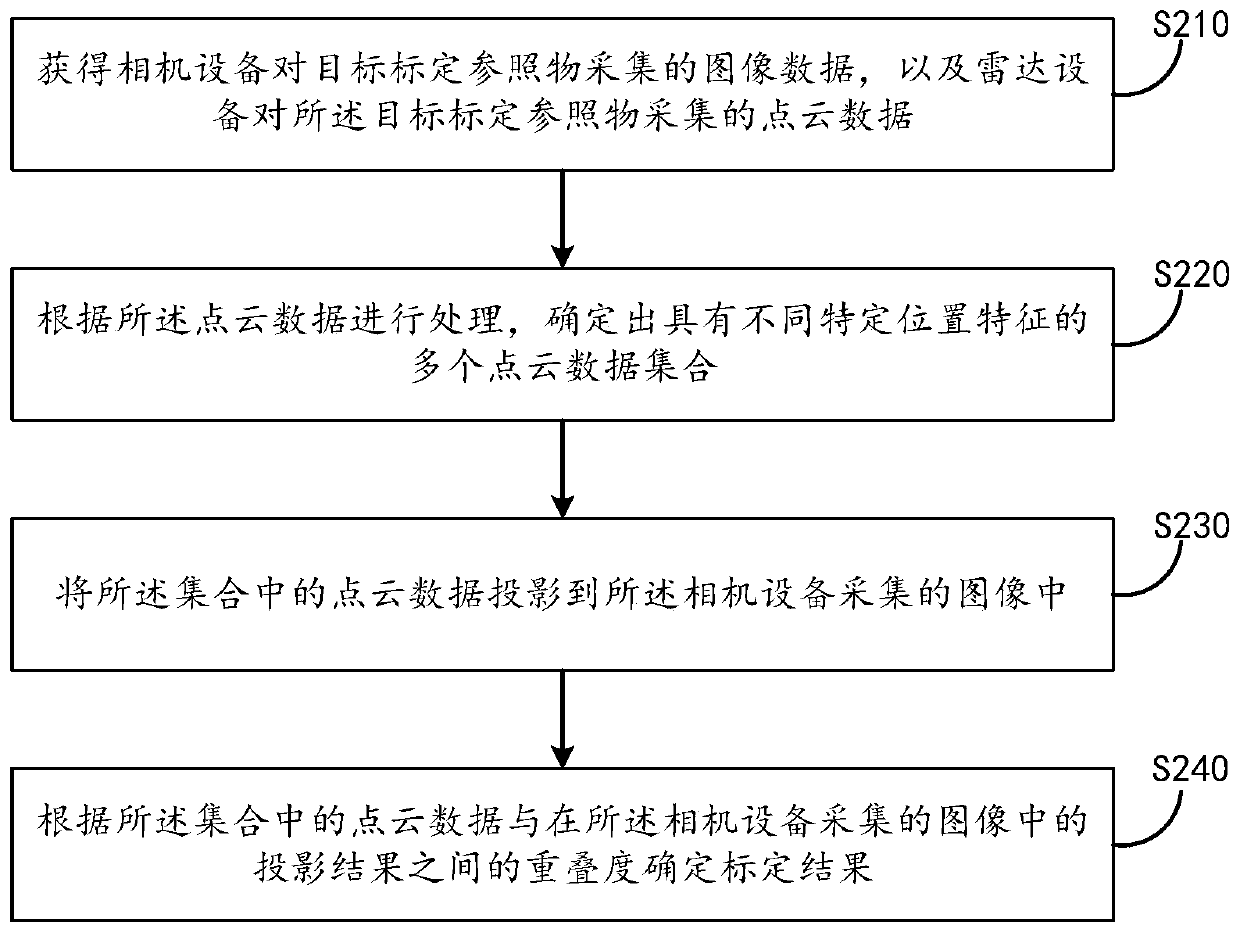
[0064] This embodiment one is mainly from aforementioned figure 1 From the perspective of the processing device shown in , an external parameter calibration method is provided. The execution body of the method can be a computer program running in the processing device, or it can also be solidified in the processing device through hardware. processing modules, etc. Specifically, see figure 2 , the method may specifically include:
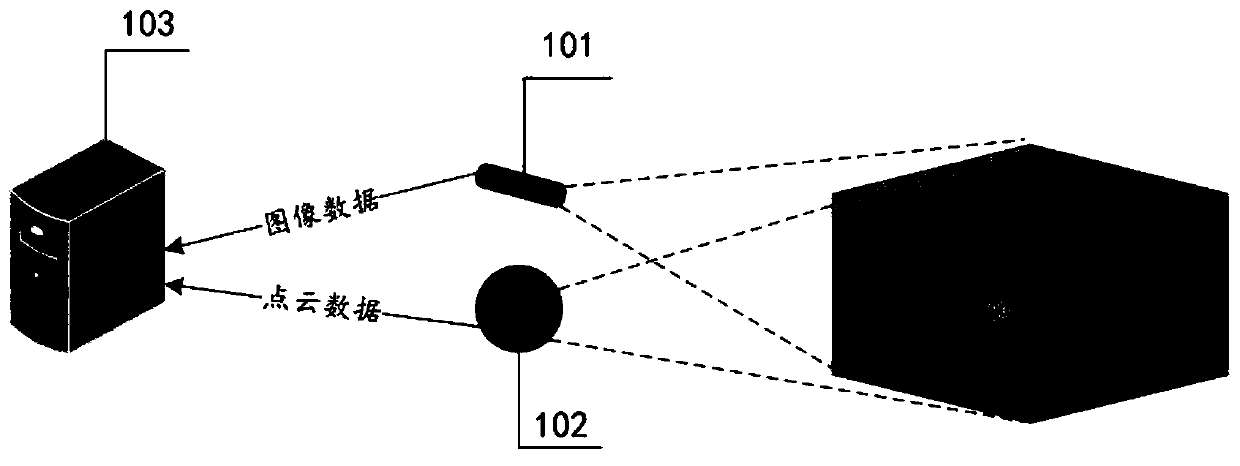
[0065] S210: Obtain the image data collected by the camera device on the target calibration reference object, and the point cloud data collected by the radar device on the target calibration reference object, wherein the target calibration reference object includes a plurality of preset colors and forms a preset angled plane body;
[0066] The specific purpose of calibration in the embodiment of the present application is to obtain the conversion relationship between the coordinate system of the radar device (for example, lidar) and the coordinat...
Embodiment 2
[0095] The second embodiment provides a calibration reference object, wherein, the calibration reference object includes a plurality of planar bodies with preset colors and forming a preset angle, and the calibration reference object is used for the same environment perception system installed The rotation and translation relationship between the coordinate system of the camera device and the radar device is calibrated.
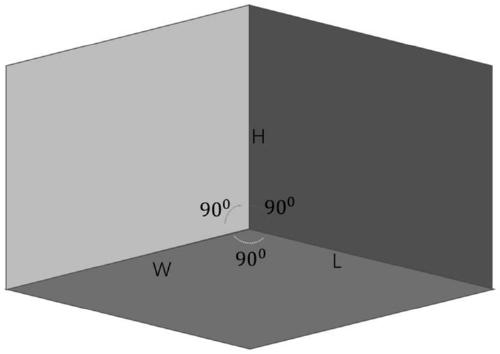
[0096] In a specific implementation, the target calibration reference object may include a plurality of mutually orthogonal planar bodies.
[0097] In the target calibration reference object, the same plane body has the same color, and different plane bodies have different colors.
[0098] Alternatively, the same planar body has the same color, and two planar bodies with an intersecting relationship have different colors.
[0099] Specifically, see image 3 As shown, the number of said planar bodies can be specifically three, and they are orthogonal to each...
Embodiment 3
[0101] The third embodiment provides an environment perception system from the perspective of specific application scenarios, wherein the specific environment perception system can also have a variety of more specific applications, for example, including road condition information perception, or robot equipment Perception of the surrounding environment, etc. Specifically, see Figure 4 , the system can specifically include:
[0102] A camera device 410, configured to collect image data of the target environment;
[0103] A radar device 420, configured to collect point cloud data of the target environment;
[0104] The data processing device 430 is configured to pre-store the calibration result of the conversion relationship between the camera device coordinate system and the radar device coordinate system, and perform a comparison between the camera device and the data collected by the radar device according to the calibration result. fusion to obtain a perception result of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More