

AGV composite mapping and navigation positioning method and system based on SLAM
A technology of coarse positioning and positioning, applied in the field of AGV composite mapping and navigation and positioning based on SLAM, it can solve the problems of affecting the customer's perception and experience, artificially adding feature points, and low accuracy, so as to improve the perception and experience. , avoid positioning data beating, improve the effect of uniformity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0038] figure 1 A flow chart of the SLAM-based AGV composite mapping method of this embodiment is given.
[0039] Combine below figure 1 The specific implementation process of the SLAM-based AGV composite mapping method of this embodiment will be described in detail.
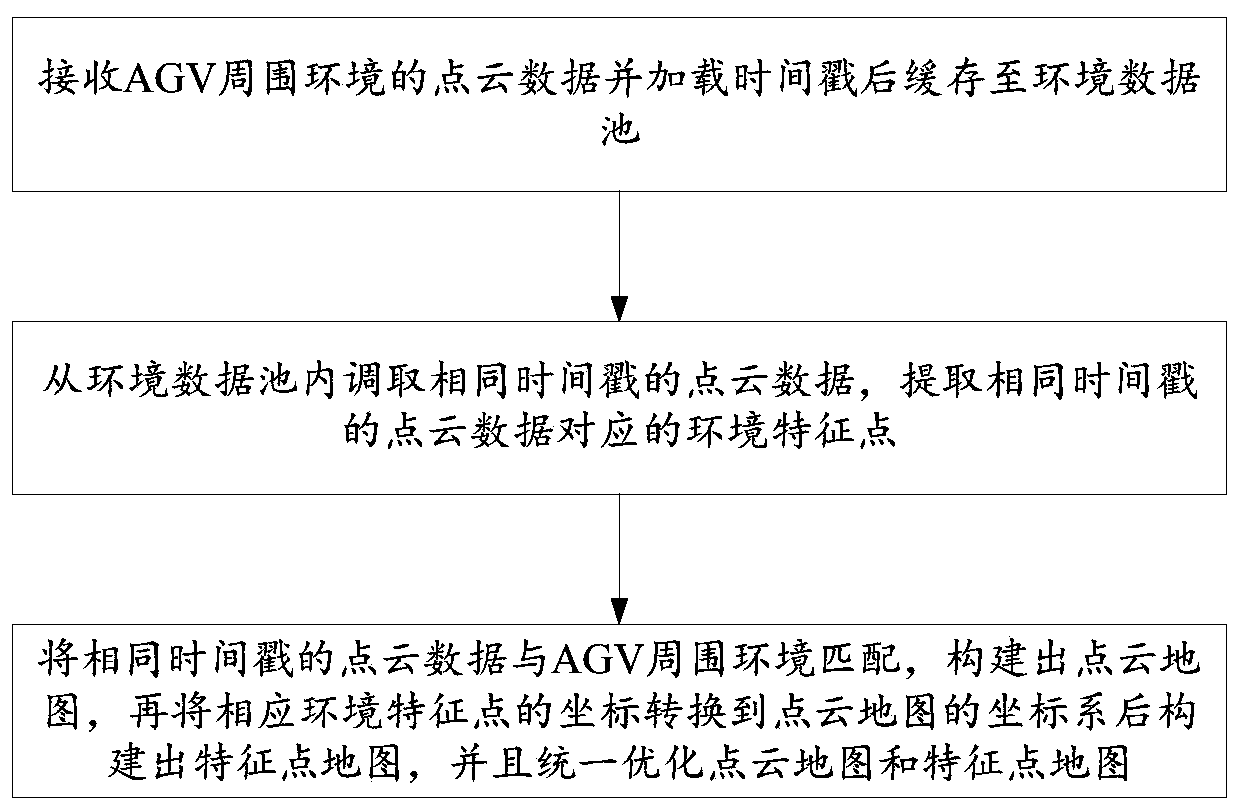
[0040] Such as figure 1 As shown, the SLAM-based AGV composite mapping method of this embodiment includes:
[0041] Step S101: Receive the point cloud data of the surrounding environment of the AGV, load it with a time stamp, and store it in the environment data pool.
[0042] In a specific implementation, the point cloud data of the surrounding environment of the AGV is collected by a camera mounted on the AGV and arranged around the AGV or by a laser sensor.
[0043] For example: the point cloud data of the surrounding environment of the AGV received at time t1 are all added with time stamp t1; the point cloud data of the surrounding environment of AGV received at time t2 are all added with time stamp t2. ...
Embodiment 2
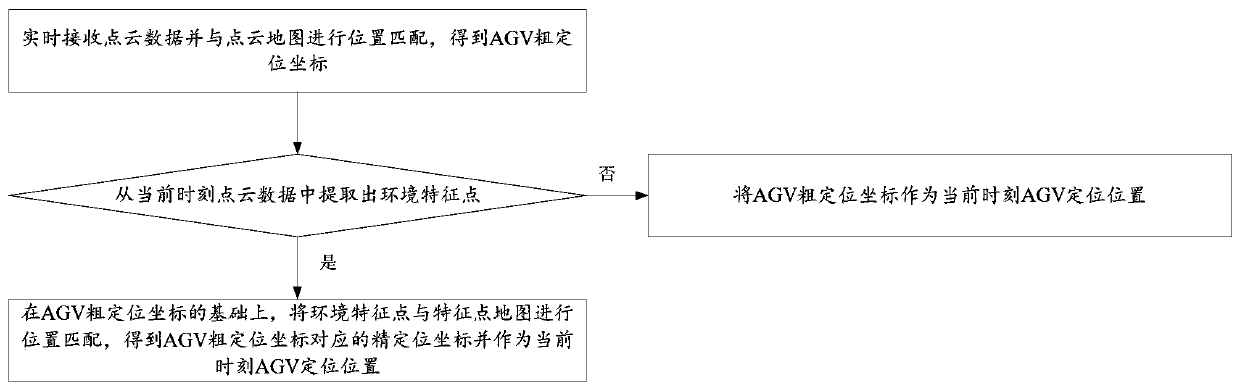
[0061] Such as figure 2 As shown, this embodiment provides a SLAM-based AGV positioning method, including:
[0062] Step S201: Receive the point cloud data in real time and perform position matching with the point cloud map to obtain the rough positioning coordinates of the AGV.
[0063] Step S202: Determine whether the environmental feature points are extracted from the point cloud data at the current moment, and if so, match the environmental feature points with the feature point map on the basis of rough positioning, and obtain the AGV fine positioning coordinates as the current AGV positioning position; otherwise, the coarse positioning coordinates of the AGV are used as the positioning position of the AGV at the current moment.
[0064] Wherein, the point cloud map and the feature point map are obtained by using the SLAM-based AGV composite mapping method as described in the first embodiment.
[0065] In this embodiment, the point cloud data is loaded with a time stamp...
Embodiment 3
[0067] image 3 A schematic structural diagram of the SLAM-based AGV composite mapping system of this embodiment is given.
[0068] Combine below figure 2 The composition of the SLAM-based AGV composite mapping system of this embodiment will be described in detail.
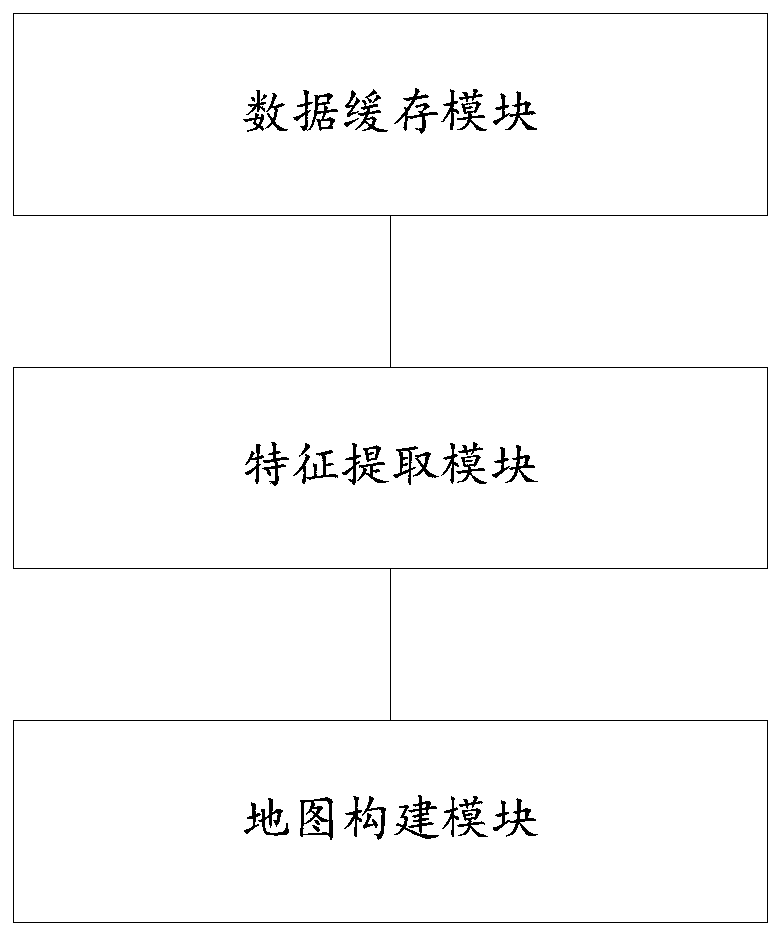
[0069] Such as figure 2 As shown, the SLAM-based AGV composite mapping system of this embodiment includes:
[0070] (1) The data caching module, which is used to receive the point cloud data of the surrounding environment of the AGV and cache it to the environment data pool after loading the time stamp.
[0071] In a specific implementation, the point cloud data of the surrounding environment of the AGV is collected by a laser sensor mounted on the AGV and arranged around the AGV.
[0072] For example: the point cloud data of the surrounding environment of the AGV received at time t1 are all added with time stamp t1; the point cloud data of the surrounding environment of AGV received at time t2 are all added...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More