

Method for realizing stair climbing of robot
A technology for robots and stair climbing, applied in the field of robots, can solve the problems of high power consumption, unstable landing, inflexibility, etc., and achieve the effect of flexible turning in place and low ground friction power consumption.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
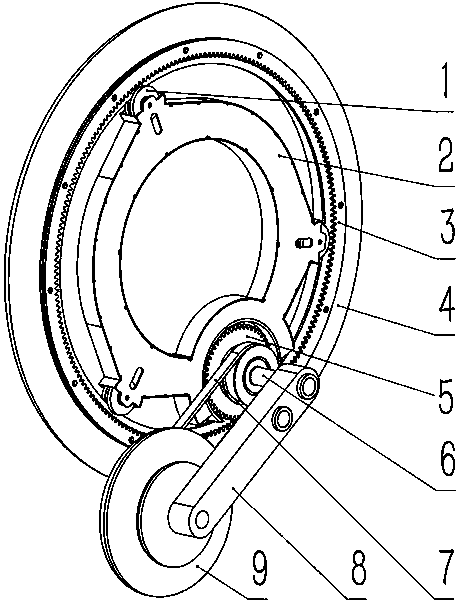
[0013] A method for realizing a robot climbing stairs. The robot uses a wheel set as a walking structure, uses a planetary gear in the wheel set to drive the front wheel to change the obstacle moment, and cooperates with the boosting effect of the synchronous power rear wheel to realize the stairs climbing.
[0014] Such as figure 1 As shown, the planetary gear drives the front wheel to change the obstacle moment, which means that the inner ring gear 3 and the sheave track are arranged on the inner ring of the front wheel 4, and the inner bracket connected to the sheave track through the sheave 1 is arranged in the front wheel 4 2. A planetary gear 5 that cooperates with the ring gear 3 is set in the inner bracket 2. When the front wheel 4 touches a step, the planetary gear 5 moves upward along the ring gear 3 under power drive, thereby changing the obstacle moment.
[0015] The boosting effect of the synchronous power rear wheel to realize climbing means that when the front w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More