Unity-based robot automatic track return method, system and device and storage medium
A robot and automatic technology, applied in the network field, can solve the problem that the robot cannot automatically return to the track, and achieve the effect of avoiding the delay of the inspection plan, reducing the loss of manpower and the waste of resources.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
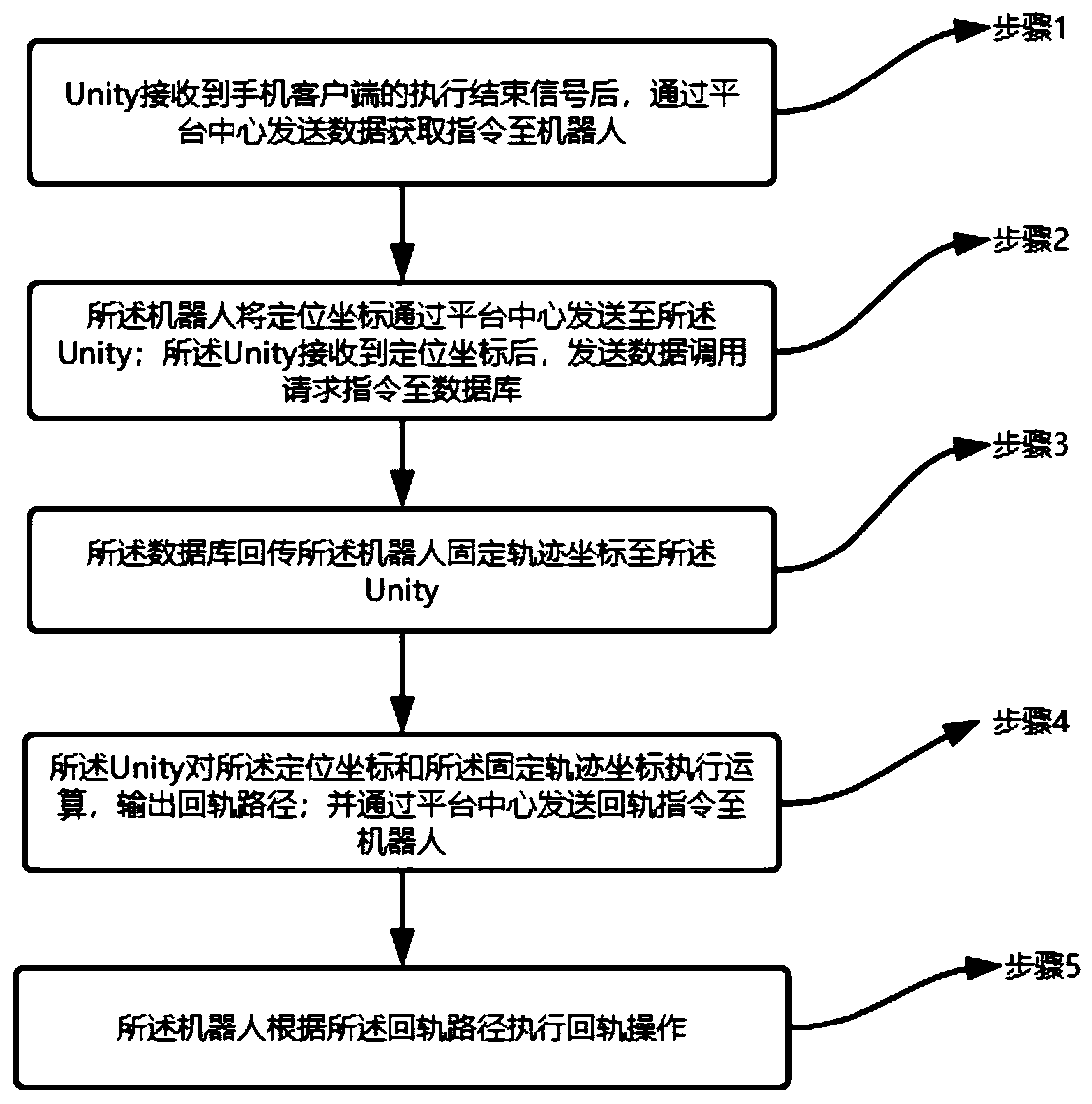
[0049] Such as figure 1 As shown, in the present embodiment, a robot 5 based on Unity1 is provided for an automatic track-returning method, which is implemented in the following steps:
[0050] Step S10: After Unity1 receives the execution end signal from the mobile client 4, it sends a data acquisition command to the robot 5 through the platform center 2; specifically, if manual safety operation detection is required in the repair and technical transformation site, the robot 5 will Break away from its own fixed trajectory and execute a new detection route; when the new detection route is detected, the robot 5 needs to return to the fixed trajectory. At this time, Unity1 needs to obtain the positioning coordinates of the robot 5 in real time to provide data reference for the subsequent return to the fixed trajectory.
[0051] Step S20: the robot 5 sends the positioning coordinates to Unity1 through the platform center 2; after Unity1 receives the positioning coordinates, it se...
Embodiment 2
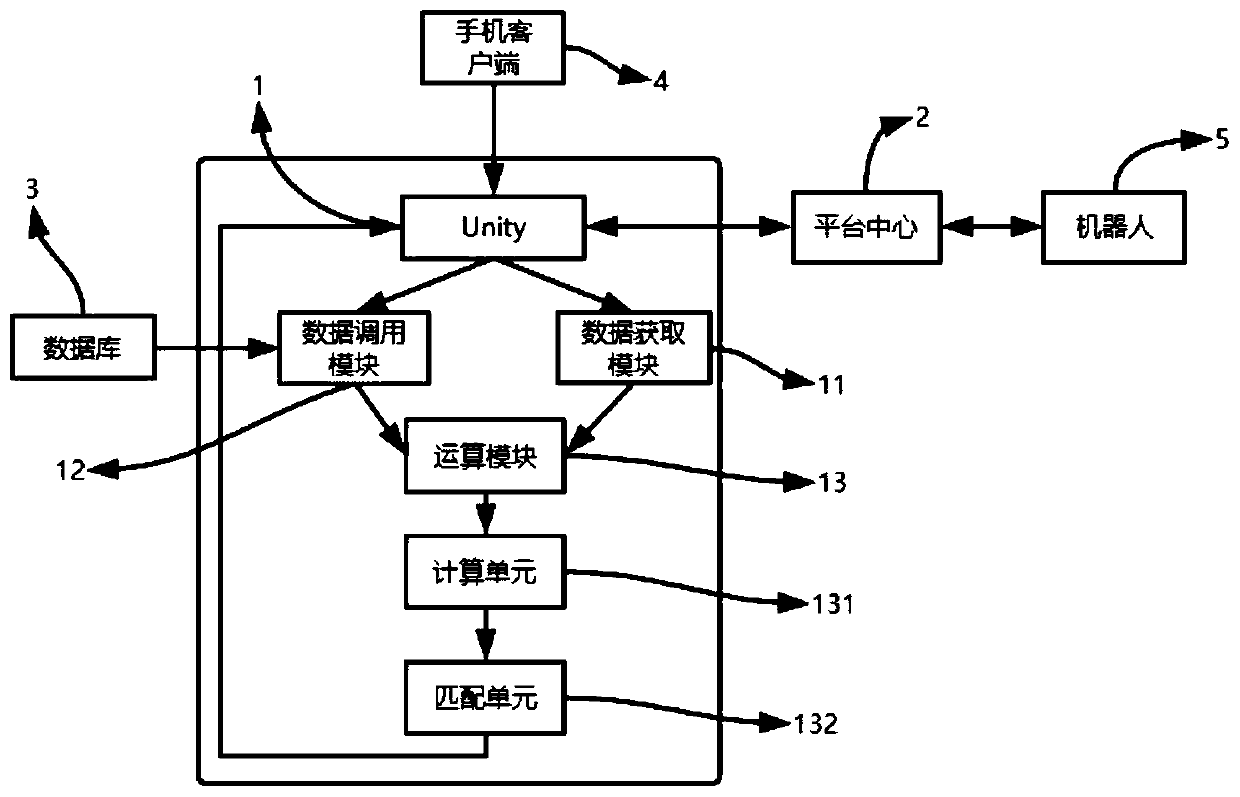
[0068] Such as figure 2 As shown, the present embodiment provides a robot 5 automatic track system based on Unity1 for the above-mentioned Unity1-based robot 5 automatic track method, including Unity1, platform center 2, mobile client 4, robot 5 and database 3 . Among them, Unity1 performs data exchange with database 3, mobile client 4 and platform center 2 respectively, and robot 5 performs data interaction with platform center 2 and mobile client 4 respectively. Among them, Unity1 is used to output the automatic track return path of robot 5, and receive and send instruction data; platform center 2 is used for background control and data transmission; database 3 is used to store the fixed trajectory coordinates of robot 5; mobile client 4, It is used to control the robot 5 to get off the track; the robot 5 is used to receive and send instruction information, and execute it.
[0069] Specifically, Unity1 includes a data acquisition module 11, a data call module 12, and an o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com