

Map construction method of laser radar trolley in slope environment
A technology of laser radar and map construction, which is applied in the directions of electromagnetic wave re-radiation, re-radiation, and measurement devices, which can solve problems such as the deterioration of autonomous navigation capabilities, and achieve the effects of improving robustness, real-time performance, and reducing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with accompanying drawing.
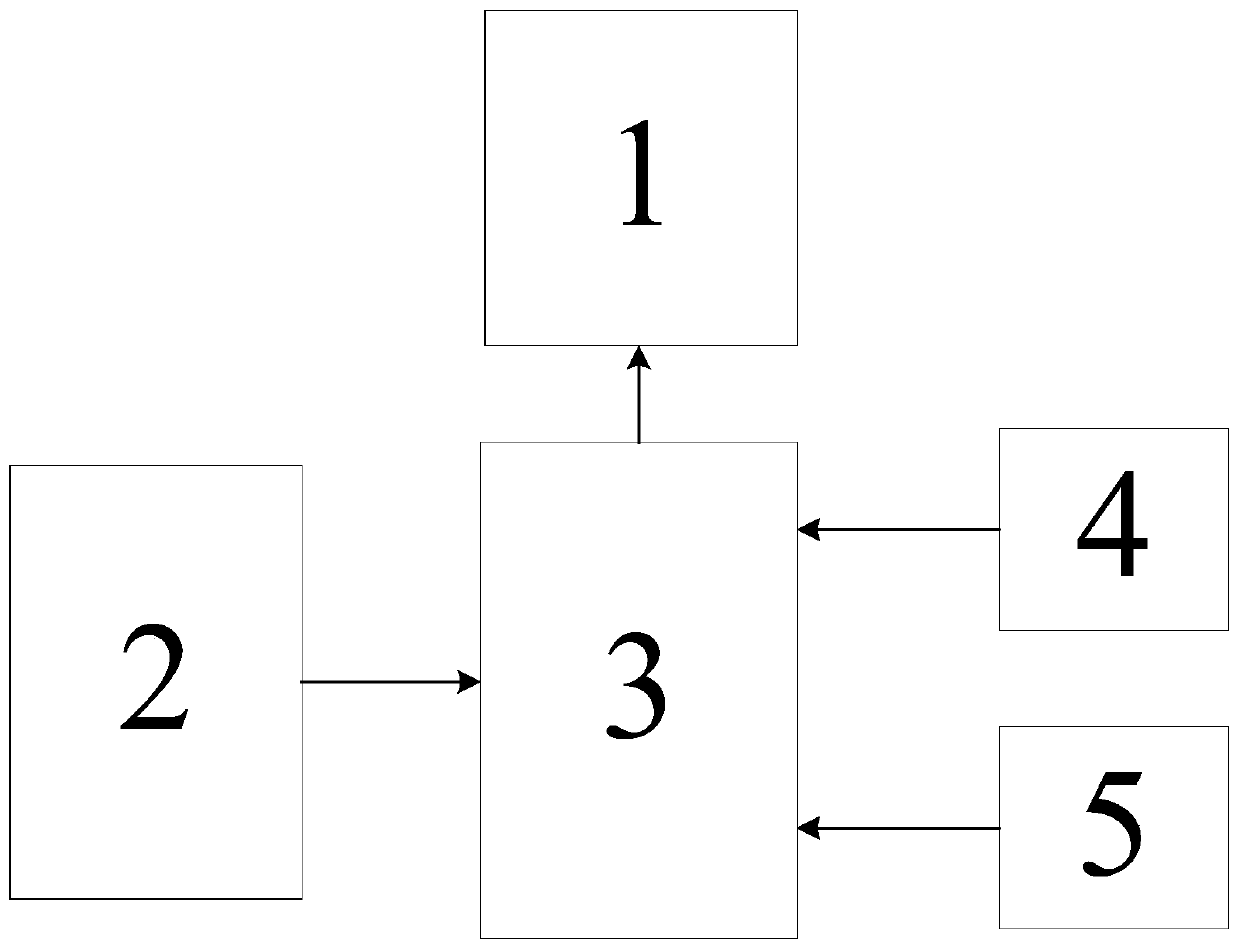
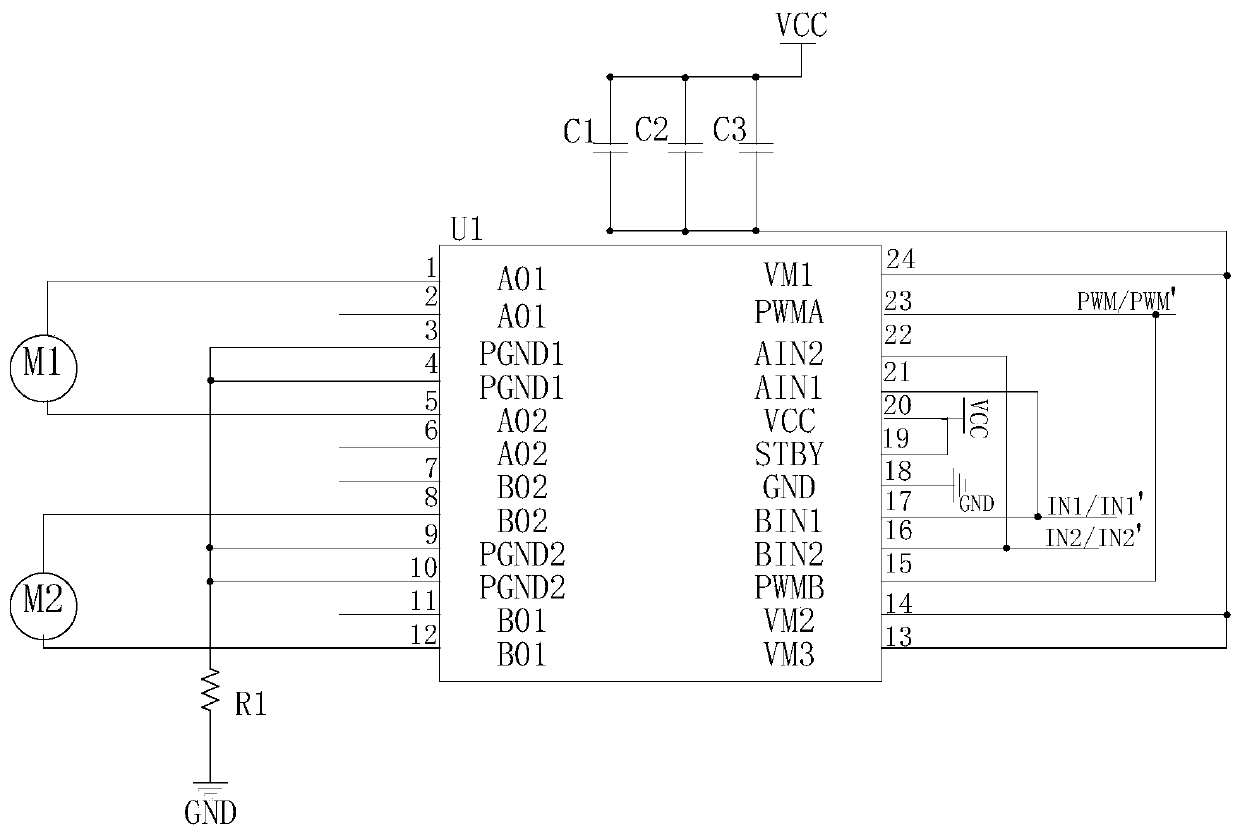
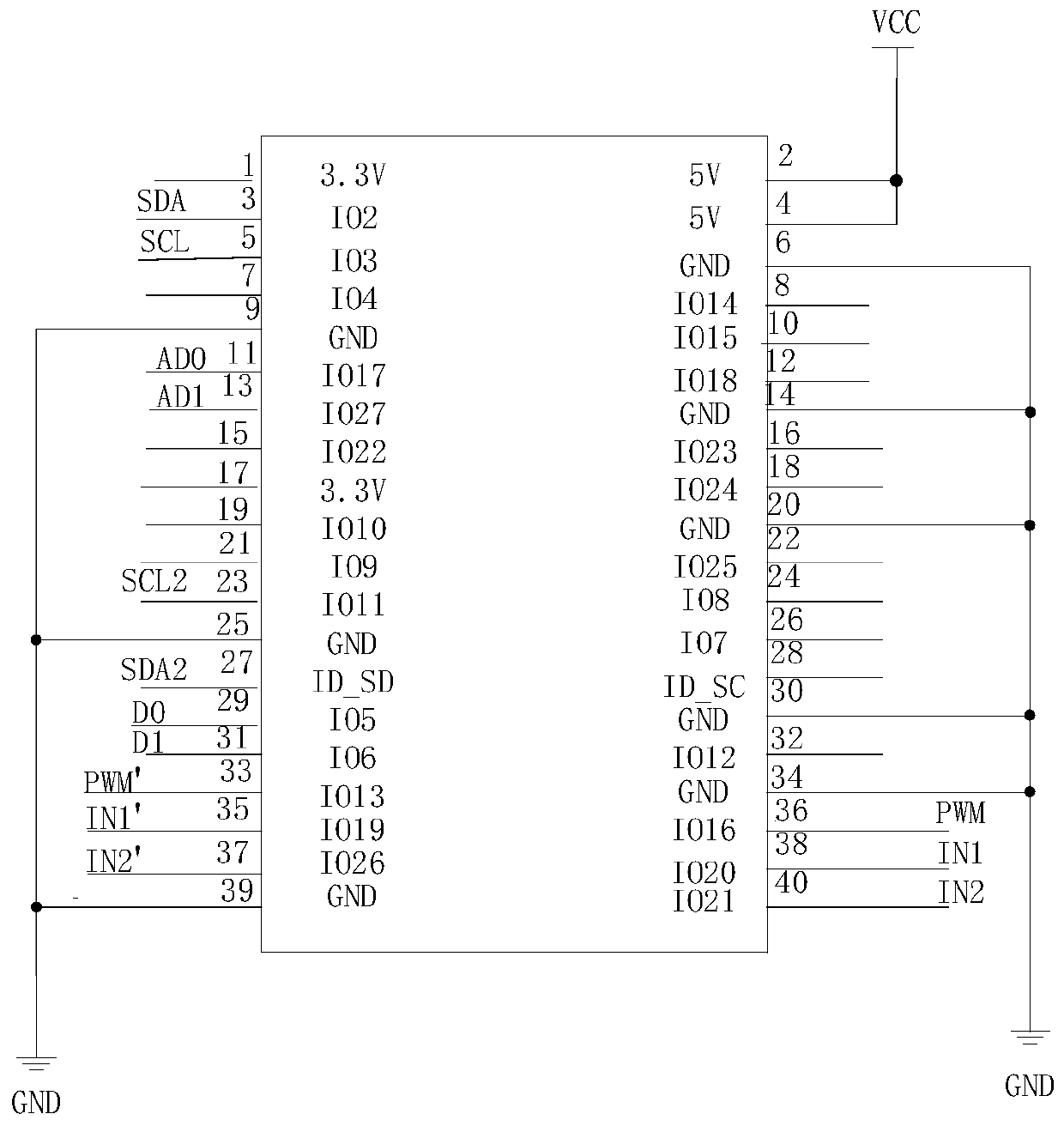
[0035] Such as figure 1 As shown, a map construction method of a LiDAR car in a complex slope environment, the LiDAR car used includes a LiDAR sensor 2, a gyroscope 4, a DC power supply module 5, a control module 3, a motor drive circuit 1 and a car chassis . Both the laser radar sensor 2 and the gyroscope 4 are installed on the laser radar car. The main body of the trolley includes the body, wheels and motor. The four wheels are mounted on the bottom of the body and driven by motors to power the lidar car. The motor is controlled by the control module 3 . The DC power supply module 5 adopts a lithium-ion battery to supply power for the laser radar sensor 2, the gyroscope 4, the control module 3 and the motor. The model of the gyroscope is MPU-6050.
[0036] The gyroscope 4 senses angle information and acceleration information, and transmits the data to the control mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More