

Multi-rotor nonlinear flight control method based on quaternion
A flight control and multi-rotor technology, applied in the field of multi-rotor flight control, can solve problems such as difficult to control under-actuation, unable to effectively control multi-rotor stability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
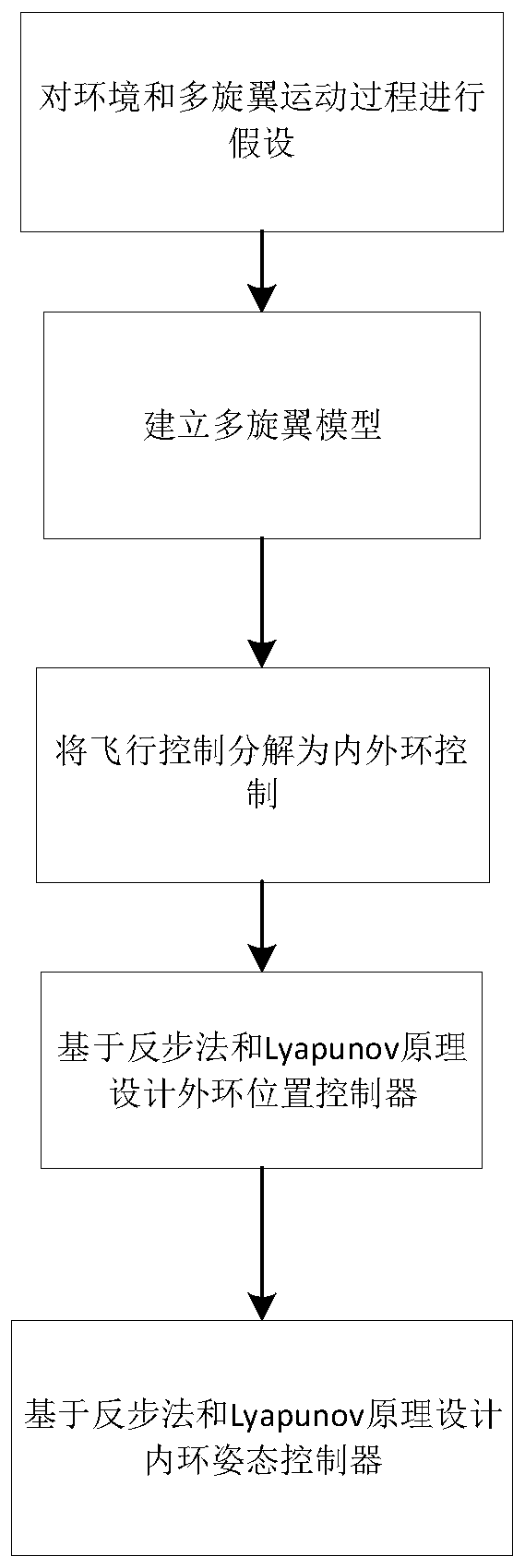
[0118] combine figure 1 , an embodiment of the present invention provides a quaternion-based multi-rotor nonlinear flight control method, including:
[0119] S1, making assumptions about the movement process of the aircraft and the external environment;
[0120] S2, establishing a multi-rotor position control model and an attitude control model;
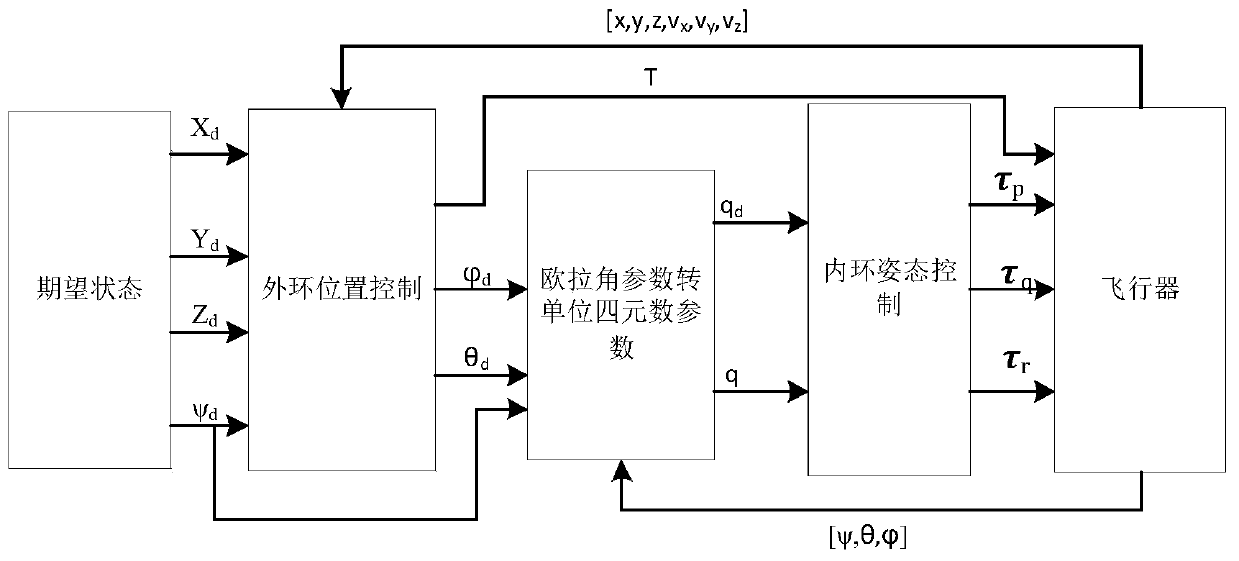
[0121] S3, the multi-rotor flight control is decomposed into outer loop position control and inner loop attitude control;
[0122] S4, using the backstepping method combined with the Lyapunov principle to design the outer ring position controller;
[0123] S5, using the backstepping method combined with the Lyapunov principle to design the inner loop attitude controller.
[0124] The multi-rotor flight control method based on the quaternion described in the examples of the present invention, at first, in order to obtain the aircraft dynamics equation of the multi-rotor, assumptions are made to the motion process of the aircraft an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More