

Robot automatic accurate positioning hole making device and method oriented to composite material cabin section
A precise positioning, composite material technology, used in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as poor hole quality, low hole-making efficiency, and poor accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0059] The present invention will be described in detail below in conjunction with the accompanying drawings and examples.
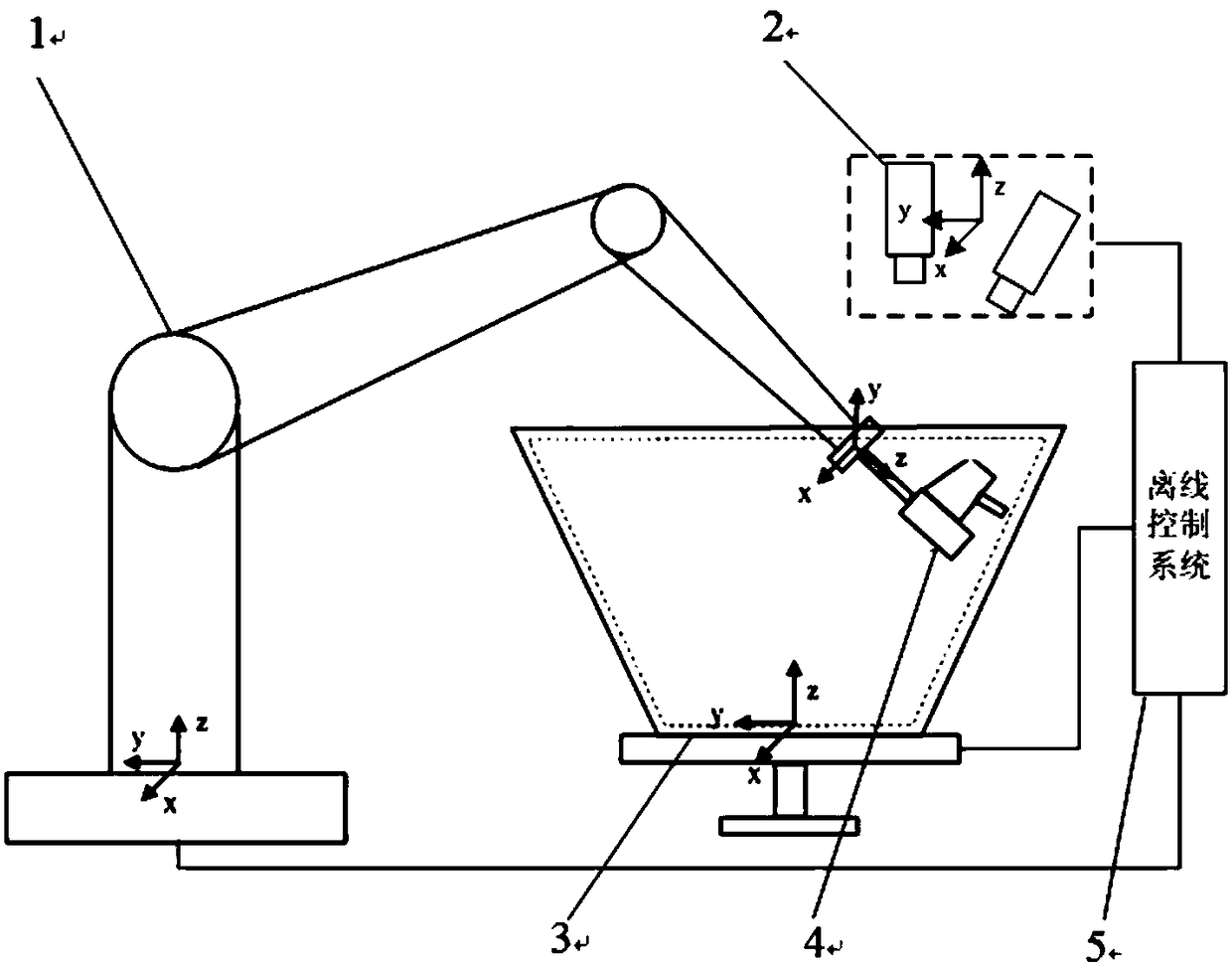
[0060] A robot automatic and precise positioning hole-making device and method for composite material compartments, including an articulated arm robot, a visual measurement system, an assembly turntable, an end effector, and an off-line control system. The end effector 4 is installed at the end of the articulated arm robot 1, and the cabin to be processed is fixed on the assembly turntable 3;
[0061] The offline control system 5 sends instructions to the assembly turntable, and controls the assembly turntable to drive the cabin to be processed to the working position; the offline control system 5 sends instructions to the articulated arm robot 1, drives the end effector 4 to the initial pre-designated position, and visually measures The system 2 monitors the pose of the end effector 4, and transmits the acquired pose information to the offline control s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More