

Cleaning base and self-moving robot
A robot and self-moving technology, which is applied in the direction of cleaning machinery, robot cleaning machine, cleaning action control, etc., can solve the problems of the self-moving robot's ability to overcome obstacles, the friction of the driving wheel surface, and the user's poor user experience. Achieve the effects of improving self-cleaning efficiency, reducing wear, and structural protection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
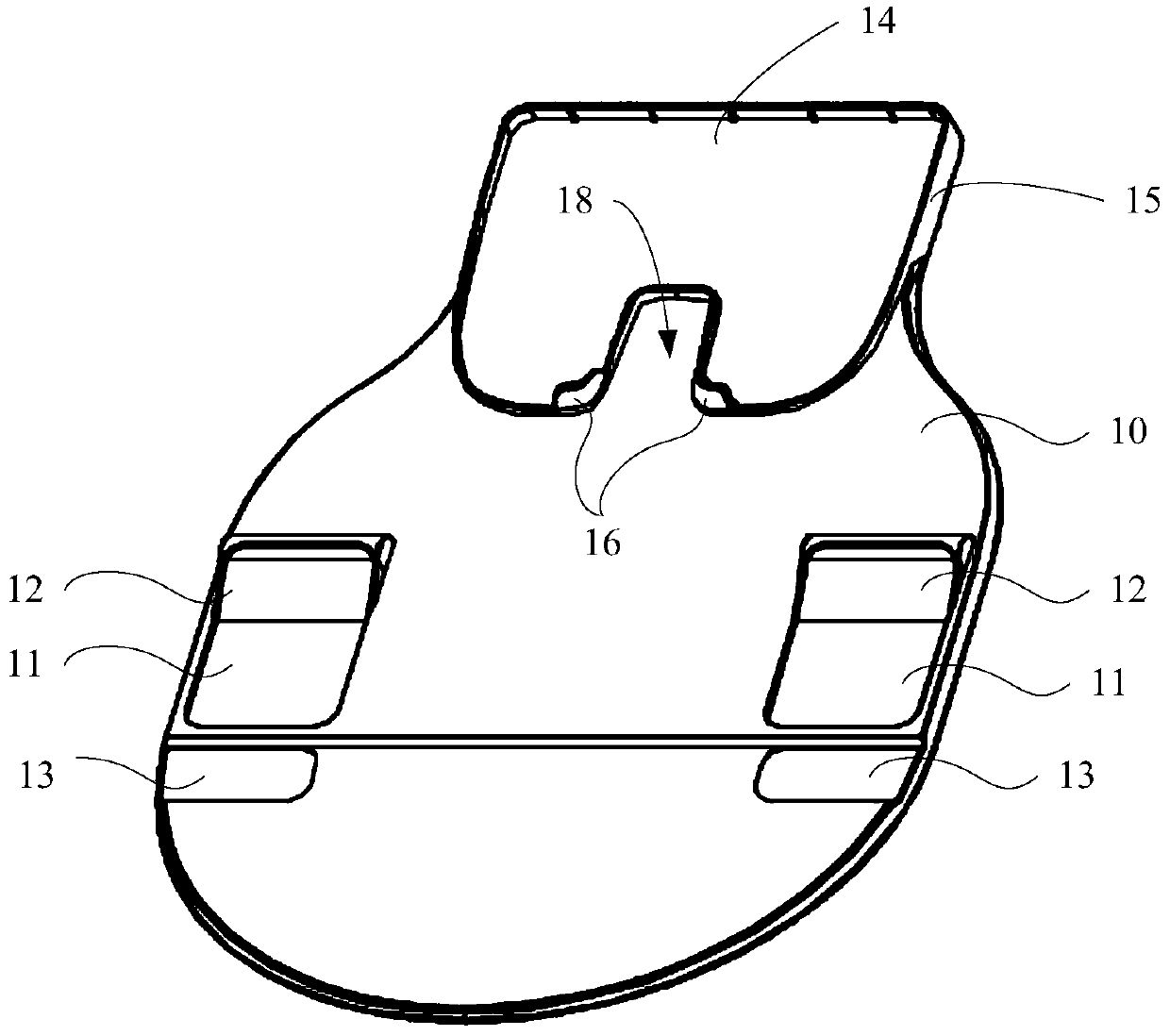
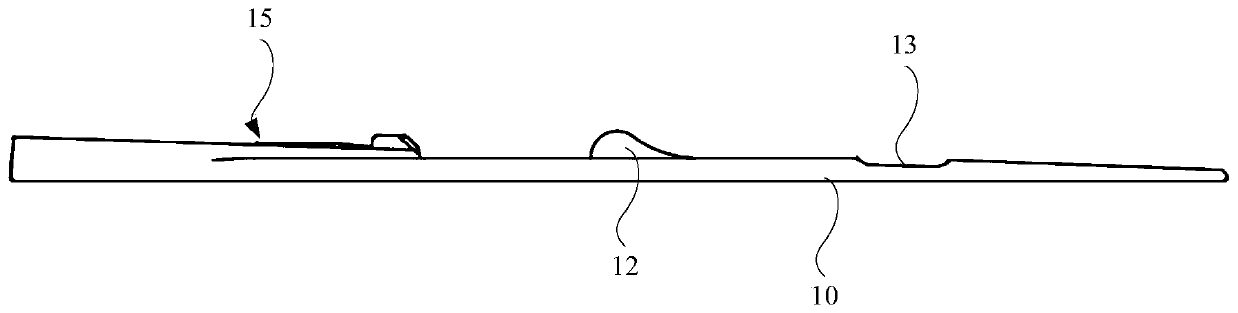
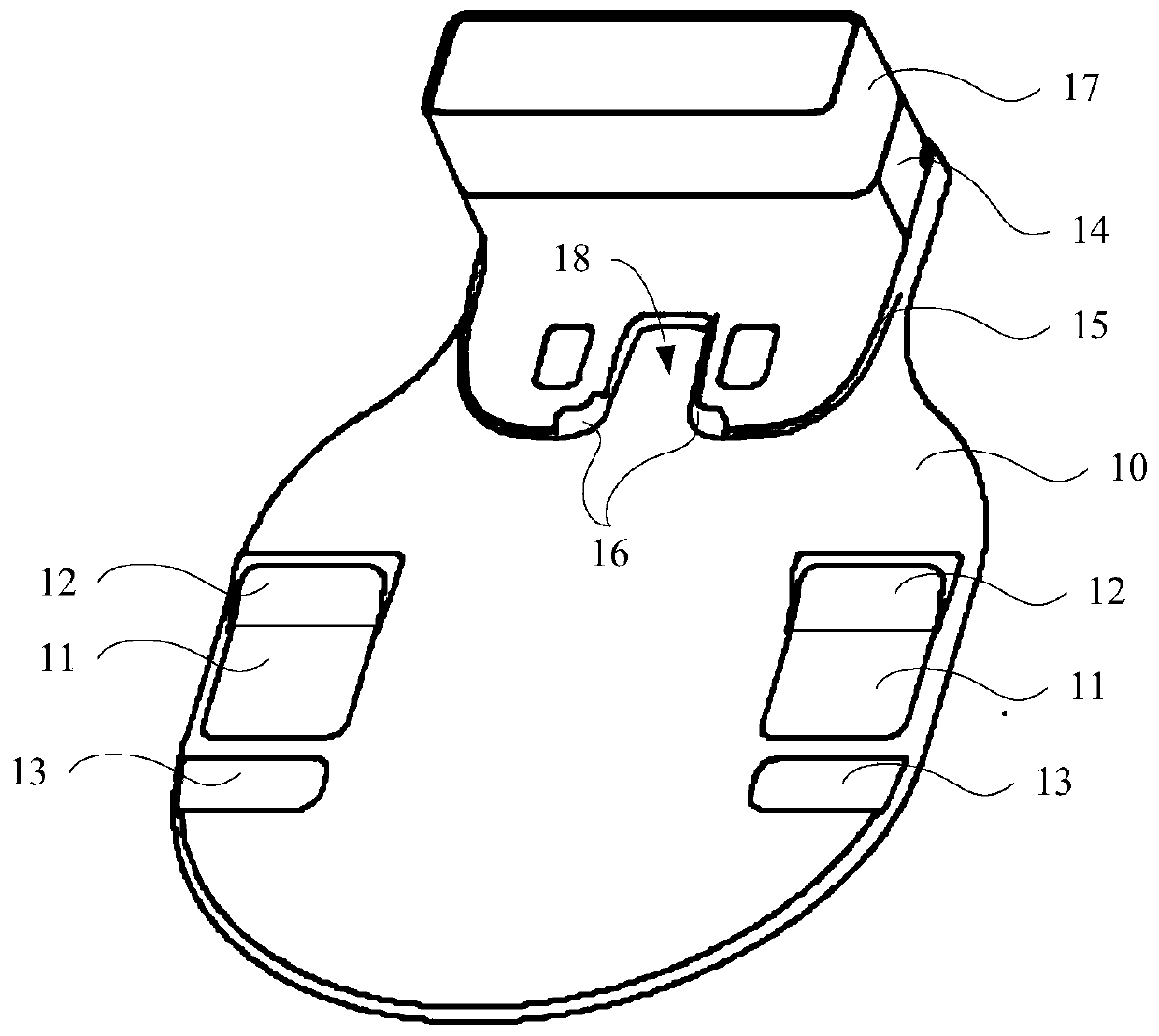
Image

Examples
specific example 1
[0171] In one embodiment, the cleaning logic executed by the self-mobile robot is as follows: control the self-mobile robot to travel—to travel to the cleaning area of the cleaning base to reciprocate for cleaning.
[0172] The specific flow of the self-mobile robot control method is as follows:
[0173] S11. Control the self-mobile robot to move toward the cleaning base.
[0174] Specifically, the travel command can be generated through the control buttons provided on the mechanical body of the self-mobile robot, or through a remote controller used in conjunction with the self-mobile robot, or according to a pre-defined program execution logic. For specific detailed explanations, refer to the foregoing embodiments, which will not be repeated here.
[0175] S12. During the process of controlling the self-mobile robot to travel to the cleaning base, after the self-mobile robot recognizes the identified component, generate a cleaning task instruction.
[0176] S13. Control t...
specific example 2
[0182] In one embodiment, the cleaning logic performed by the self-mobile robot is as follows: control the self-mobile robot to travel—to advance to the limit part where the self-mobile robot touches the cleaning base—continue to keep the driving wheel rotating in place in the cleaning area Clean up.
[0183] The specific flow of the self-mobile robot control method is as follows:
[0184] S21. Control the self-mobile robot to move toward the cleaning base.
[0185] Specifically, the travel command can be generated through the control buttons provided on the mechanical body of the self-mobile robot, or through a remote controller used in conjunction with the self-mobile robot, or according to a pre-defined program execution logic. For specific detailed explanations, refer to the foregoing embodiments, which will not be repeated here.
[0186] S22. When the self-mobile robot recognizes the identified component, the self-mobile robot decelerates and travels to the cleaning are...
specific example 3
[0193] In one embodiment, the cleaning logic performed by the self-mobile robot is as follows: receiving the charging task instruction, performing the charging task-controlling the self-mobile robot to travel-triggering the generation of the cleaning task instruction, traveling to the cleaning area of the cleaning base and performing reciprocating motion Cleaning - After the cleaning task is completed, resume the charging task.
[0194] The specific flow of the self-mobile robot control method is as follows:
[0195] S31. In response to a charging task instruction, the self-mobile robot moves toward the cleaning base according to the positioning signal.
[0196] S32. Judging whether the self-mobile robot recognizes two recognition parts, if yes, execute step S33, if not, execute step S34.
[0197] S33. In the case that the self-mobile robot recognizes two recognition components, control the self-mobile robot to suspend execution of the charging task, and generate the cleani...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More