

Transformer substation inspection robot positioning and navigation system and method based on three-dimensional laser and binocular vision
An inspection robot and binocular vision technology, applied in radio wave measurement systems, instruments, electromagnetic wave re-radiation, etc., can solve problems such as insufficient precision, difficult construction, electromagnetic interference in substations, etc., to improve positioning accuracy and precision, The effect of reducing the intensity and demand of inspections and ensuring precision and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
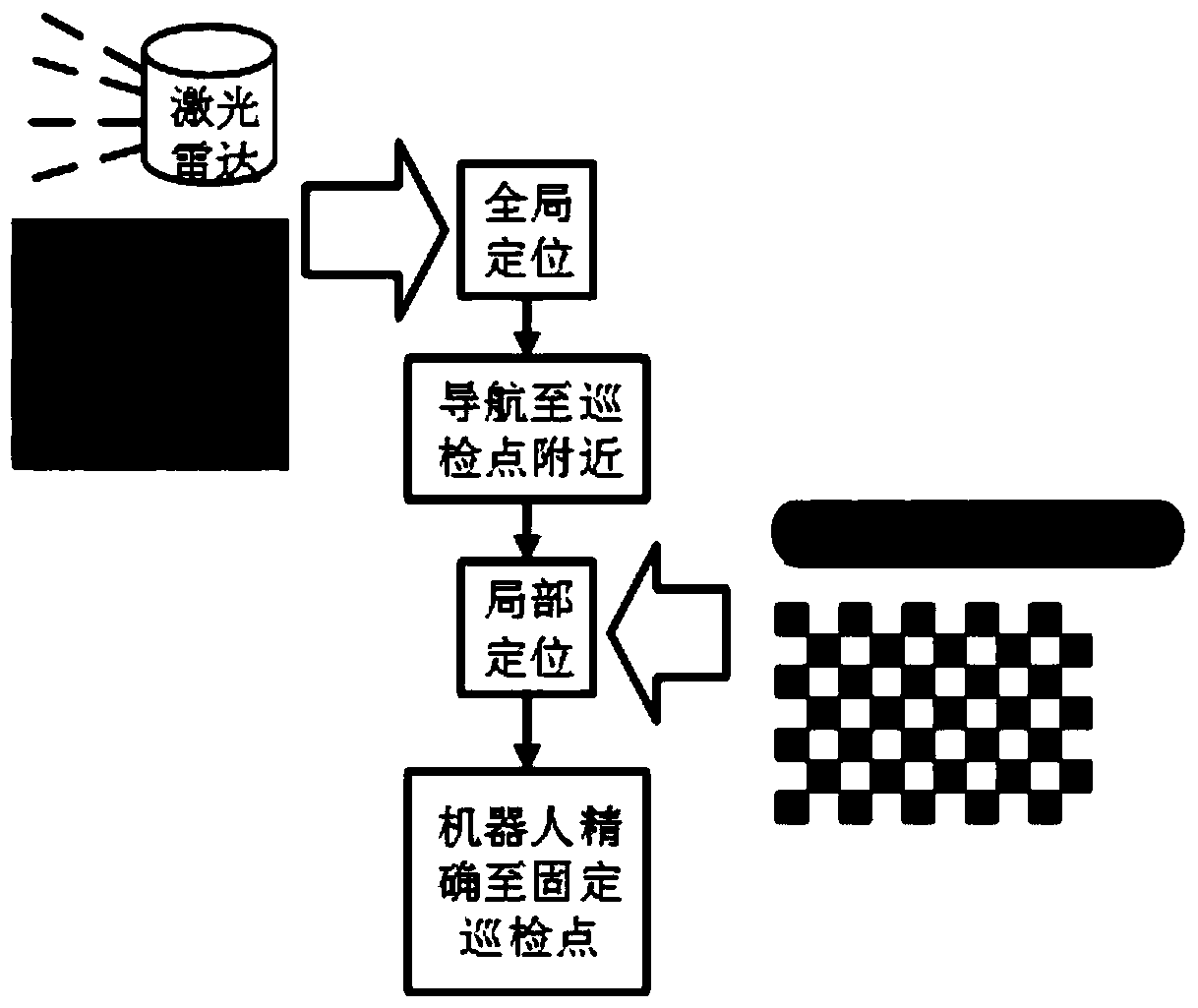
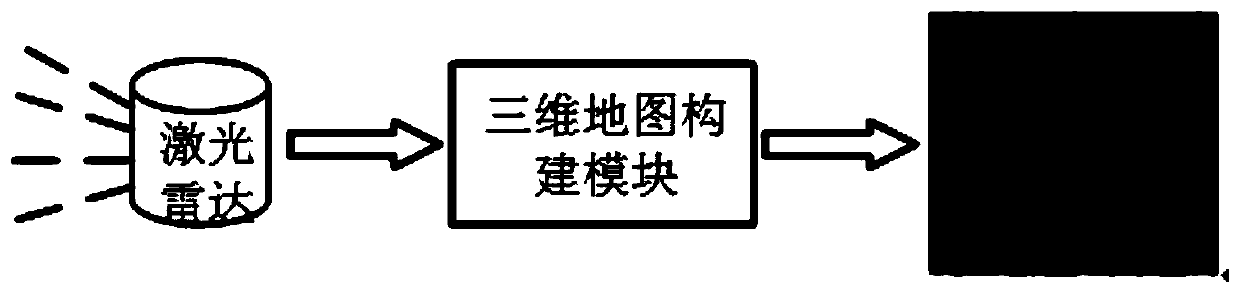
[0030] The substation inspection robot positioning and navigation system based on three-dimensional laser and binocular vision of the present invention includes a three-dimensional point cloud data acquisition module, a three-dimensional map construction module, a three-dimensional map visualization module, a point cloud matching and positioning module, and binocular vision information acquisition Processing module, robot motor part.
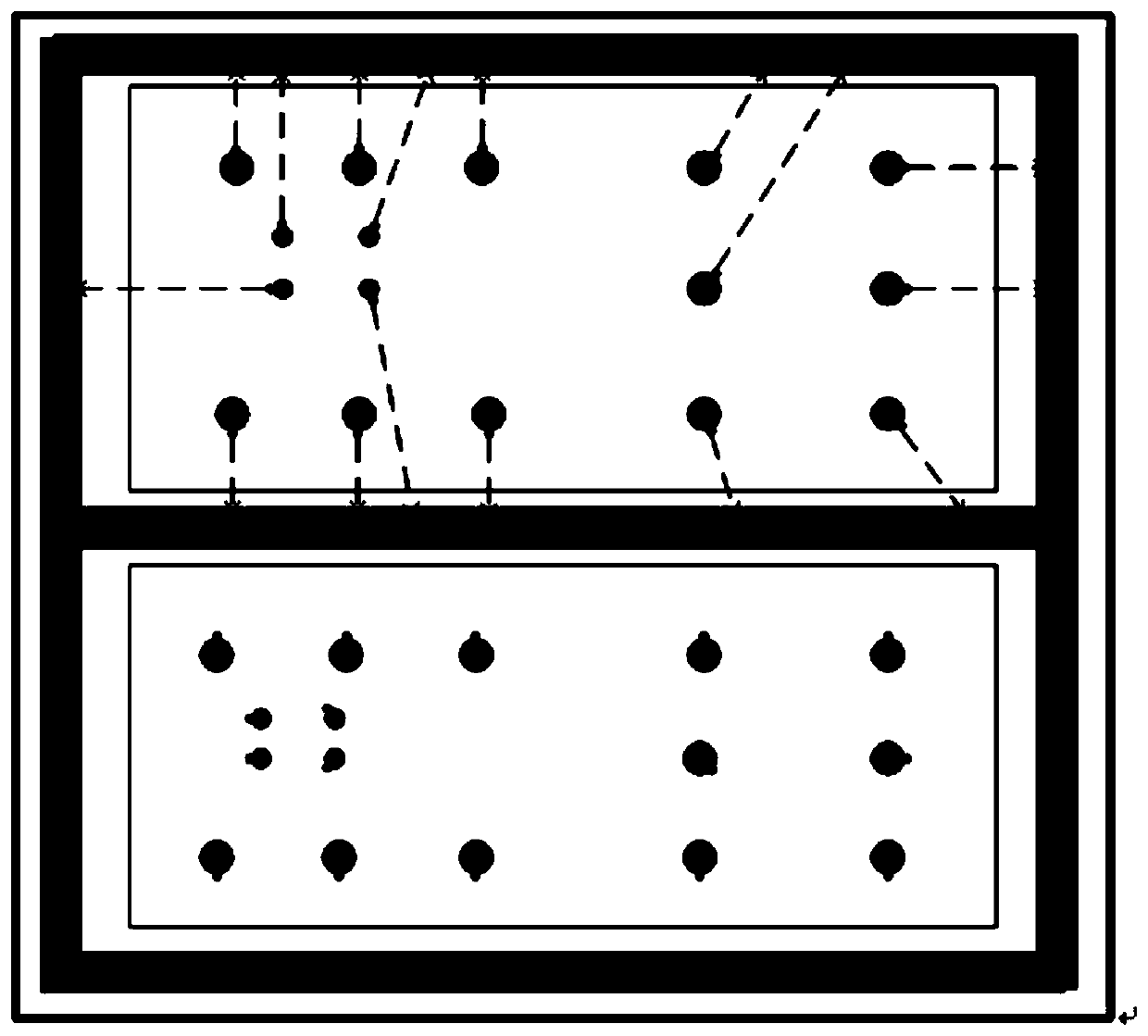
[0031] The substation refers to the large-scale substation of the power grid company. The substation is huge in scale, and the internal facilities of the site are basically substation columns and erection wires, etc., with similar characteristics. The robot system needs to complete the 3D visual mapping of the scene, distinguish similar scenes within the scene, and update its positioning informa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More