

A security level prediction method and system for UAV clusters
A security level, unmanned aerial vehicle technology, applied in control/regulation systems, complex mathematical operations, instruments, etc., can solve problems such as unsuitable drone clusters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
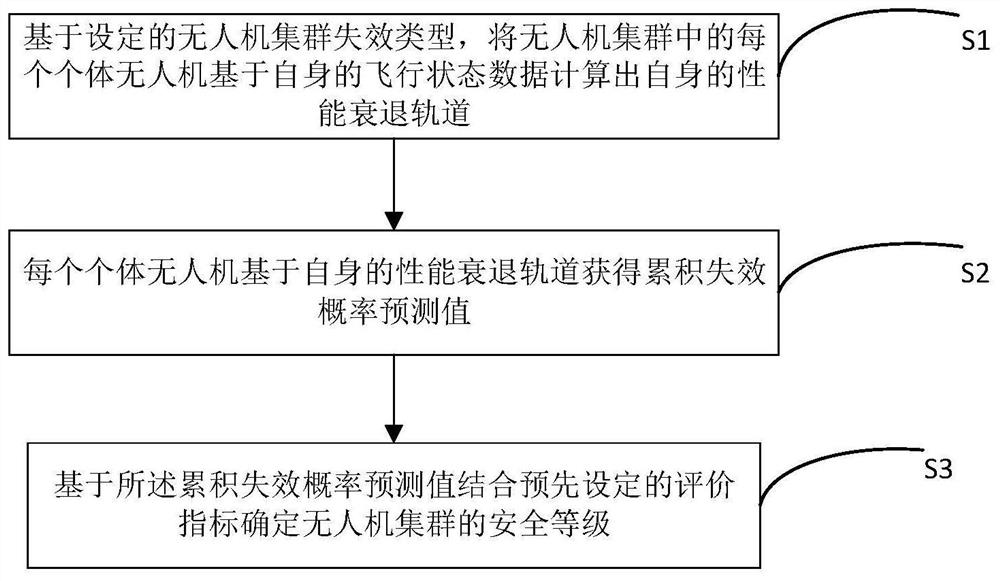
[0051] Embodiment 1: as figure 1 As shown, the present invention provides a method for predicting and evaluating the safety level of unmanned aerial vehicle clusters, including:
[0052] S1 Based on the set UAV cluster failure type, each individual UAV in the UAV cluster calculates its own performance degradation trajectory based on its own flight status data;
[0053] S2 Each individual UAV obtains the cumulative failure probability prediction value based on its own performance decline track;
[0054] S3 Determine the safety level of the UAV cluster based on the cumulative failure probability prediction value combined with a preset evaluation index.
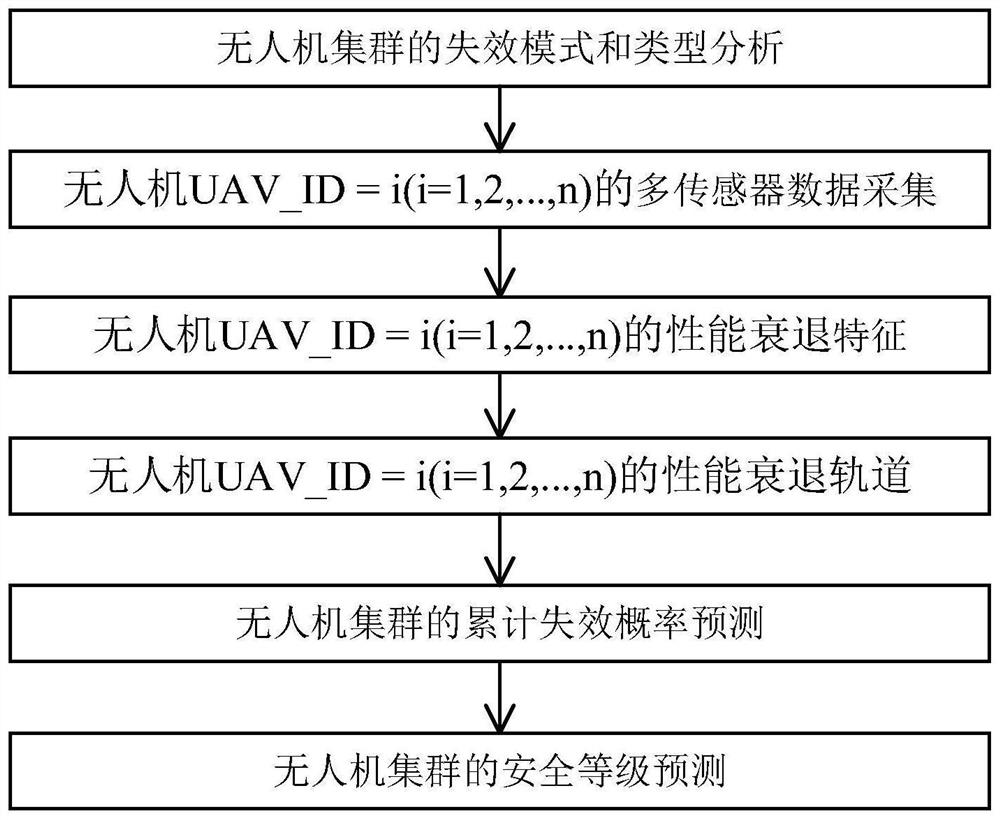
[0055] pass figure 2 right figure 1 Provided technical solutions for specific analysis, including: failure type analysis of UAV swarms, data collection of UAV flight status, feature extraction of UAV performance degradation, cumulative failure probability of UAV swarms and analysis of UAV Cluster security level evaluation. ...
Embodiment 2
[0126] Embodiment 2: In this embodiment, a cluster composed of six quadrotor UAVs is used for case analysis, and the specific implementation steps are as follows:
[0127] (1) Adapt the output interface of the individual UAV flight controller in the cluster to collect the output data of the airborne sensors.
[0128] The airborne sensor output data types used include: GPS latitude (unit: degree), GPS longitude (unit: degree), heading angle (unit: degree), pitch angle (unit: degree), roll angle (unit: degree) , horizontal flight speed (unit: mm / s), vertical flight speed (unit: mm / s), altitude measured by the barometer (unit: m), body temperature (unit: degree), vibration acceleration in the three-axis direction (Unit: m / s 2 ), the voltage value of the flight controller (unit: V), and the magnetic heading angle (unit: degree).
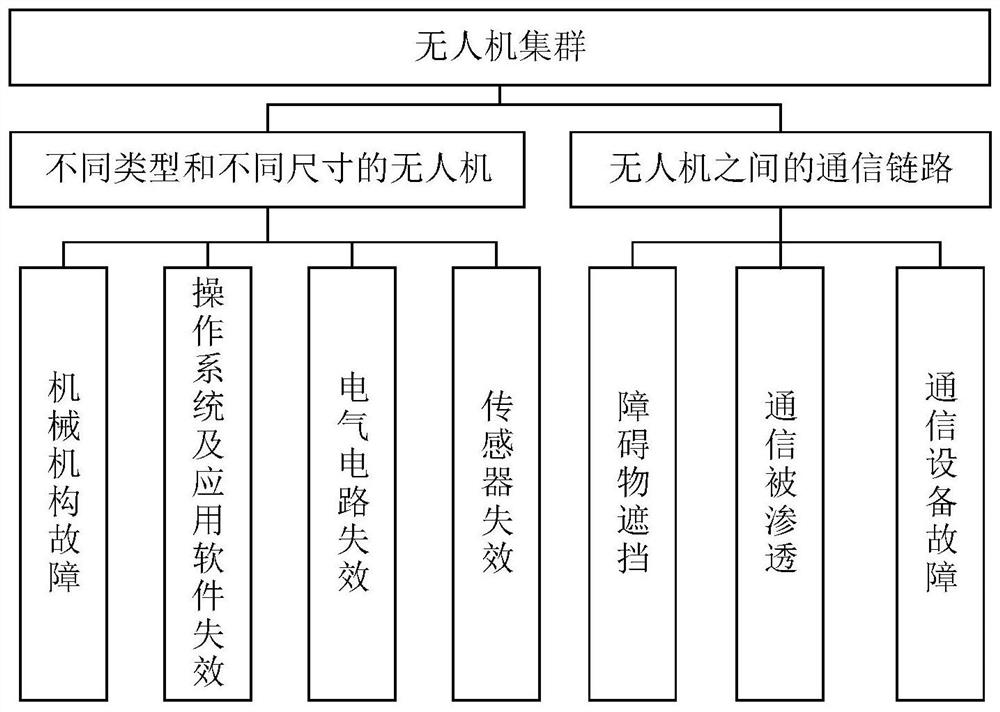
[0129] (2) Analyze the failure types of UAV clusters, and select the rough features of the failure of the whole machine. The coarse features selected...
Embodiment 3
[0157] Embodiment 3: Based on the same inventive concept, the present invention also provides a safety level prediction system for drone clusters, including:
[0158] The first calculation module is used to calculate the performance decline track of each individual drone in the drone cluster based on its own flight state data based on the set failure type of the drone cluster;
[0159] The second calculation module is used for each individual UAV to obtain a cumulative failure probability prediction value based on its own performance decline track;
[0160] A determining module, configured to determine the safety level of the unmanned aerial vehicle cluster based on the cumulative failure probability prediction value combined with a preset evaluation index.
[0161] In an embodiment, the first calculation module includes:
[0162] The analysis unit is used to analyze the airborne sensor data from the output interfaces of the controllers of all the drones in the cluster based ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More