

A 6r industrial robot inverse kinematics solution method
An industrial robot and inverse kinematics technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of large influence on convergence and precision, cumbersome results, and low efficiency, and achieve the goal of improving attitude accuracy and efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] In order to further understand the invention content, characteristics and effects of the present invention, the following embodiments are enumerated hereby, and detailed descriptions are as follows in conjunction with the accompanying drawings:
[0052] See Figure 1 to Figure 7 , a 6R industrial robot inverse kinematics solution method, the method includes the following steps:
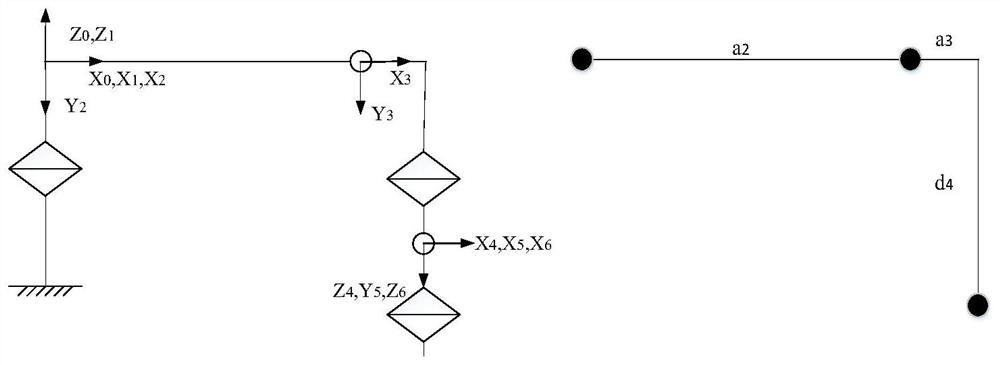
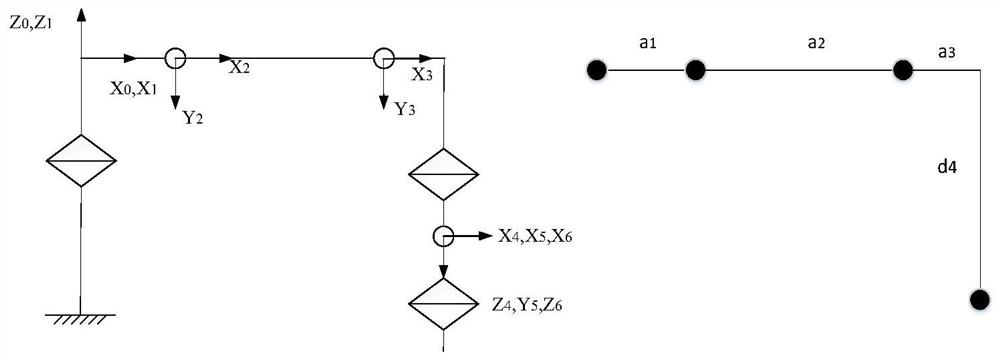
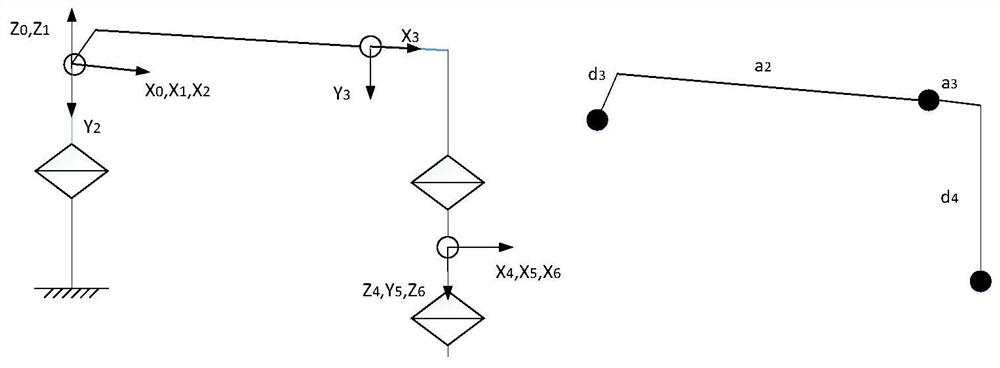
[0053] Step 1: Establish the coordinate system, geometric simplified model and D-H table of the 6R robot;
[0054] Step 2: According to the geometrically simplified model, establish the functional relationship between the joint angle of the first joint and the spatial coordinate of the origin of the coordinate system of the end link;
[0055] Step 3: Under the condition that the joint angle of the first joint has been determined, the spatial position relationship of the second link and the third link is simplified into a triangle, and the functional relationship between the joint angle of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More