

Robust iterative learning control strategy for five-degree-of-freedom upper limb exoskeleton system
An iterative learning control and system robust technology, applied in the field of exoskeleton control, can solve problems affecting the dynamic characteristics of the system, achieve the effects of reducing chattering, improving tracking accuracy, and reducing tracking errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the drawings in the embodiments of the present invention.
[0021] The present invention provides a five-degree-of-freedom upper limb exoskeleton system robust iterative learning control strategy (control strategy for short), characterized in that the operation steps are as follows:
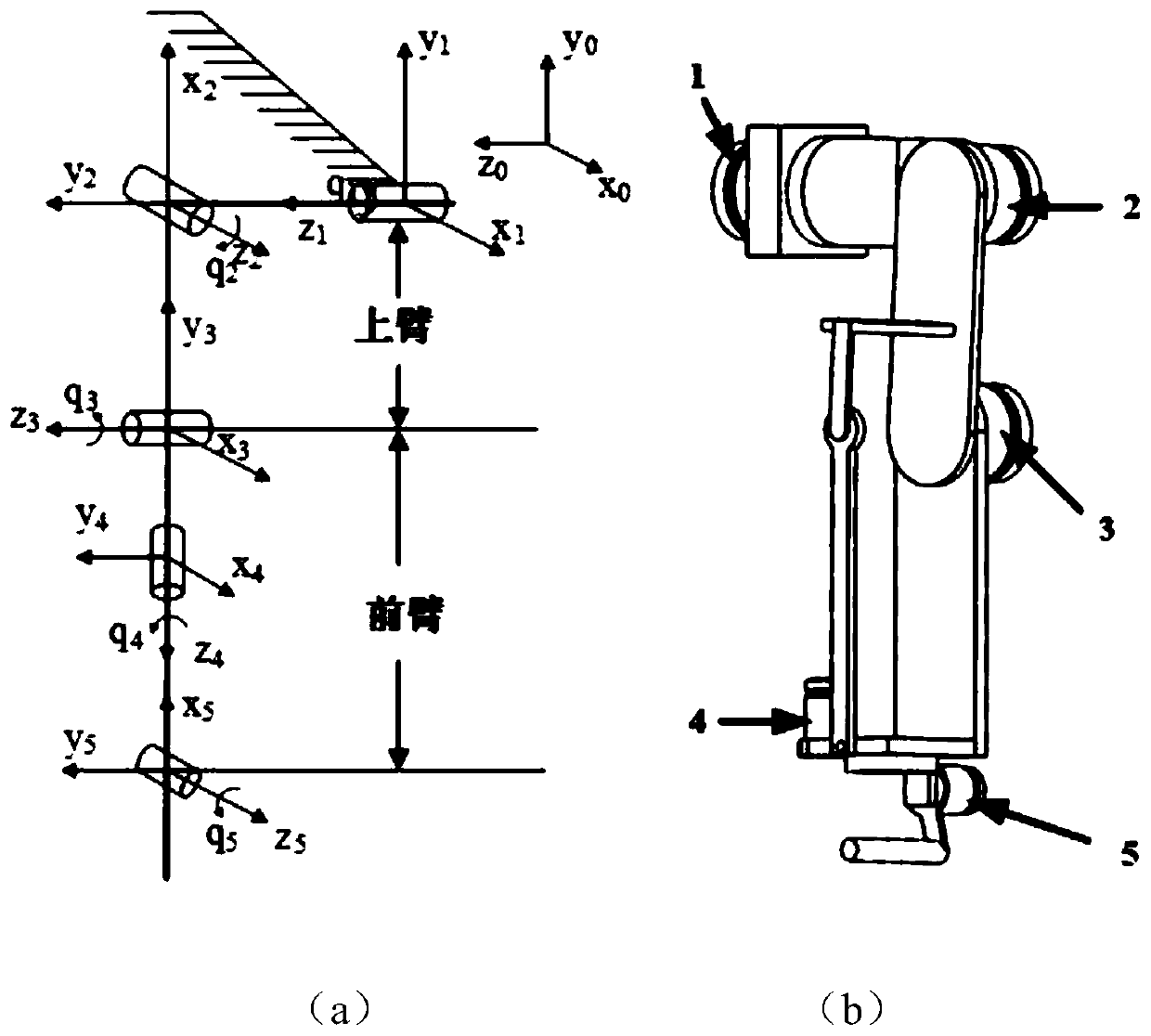
[0022] Step 1: Establish a dynamic model of the upper limb exoskeleton system with five degrees of freedom including unknown parameters and uncertain items.
[0023] Step 2: Use the VICON motion capture system to collect the upper limb movement data of healthy people, and obtain the expected movement trajectory of each joint of the five-degree-of-freedom upper limb exoskeleton system through the fitting function.
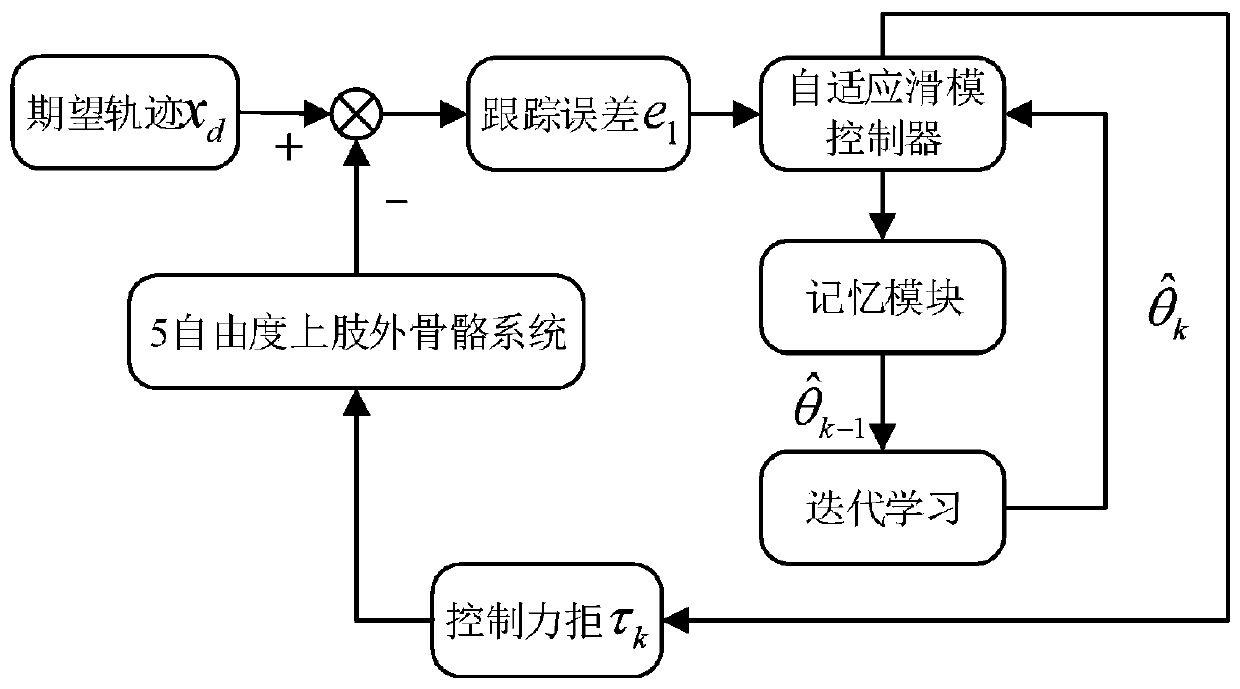
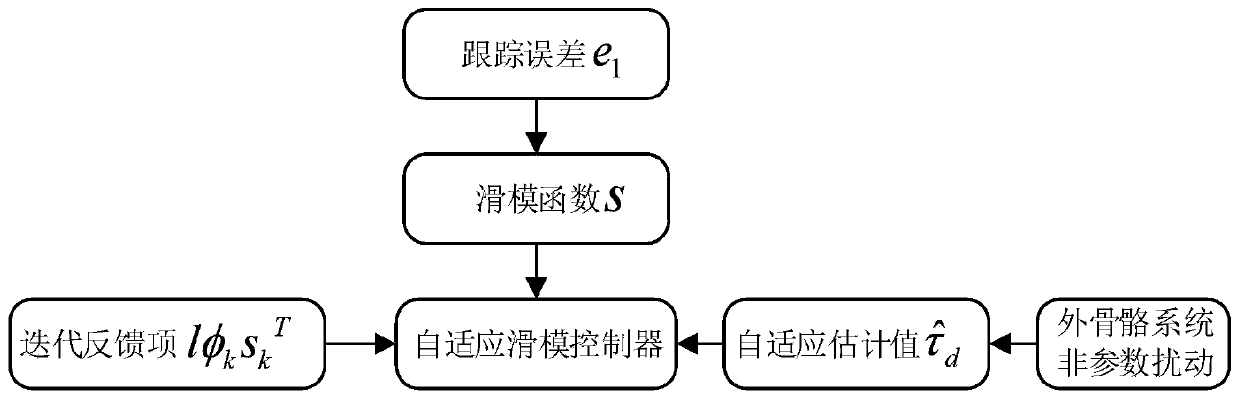
[0024] Step 3: According to the dynamic model of the five-degree-of-freedom upper limb exoskeleton system in step 1 and the expected motion tr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More