Point cloud data registration method, system and device and computer storage medium
A technology of computer storage and point cloud data, applied in computing, image data processing, neural learning methods, etc., can solve problems such as insufficient robustness, and achieve good robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
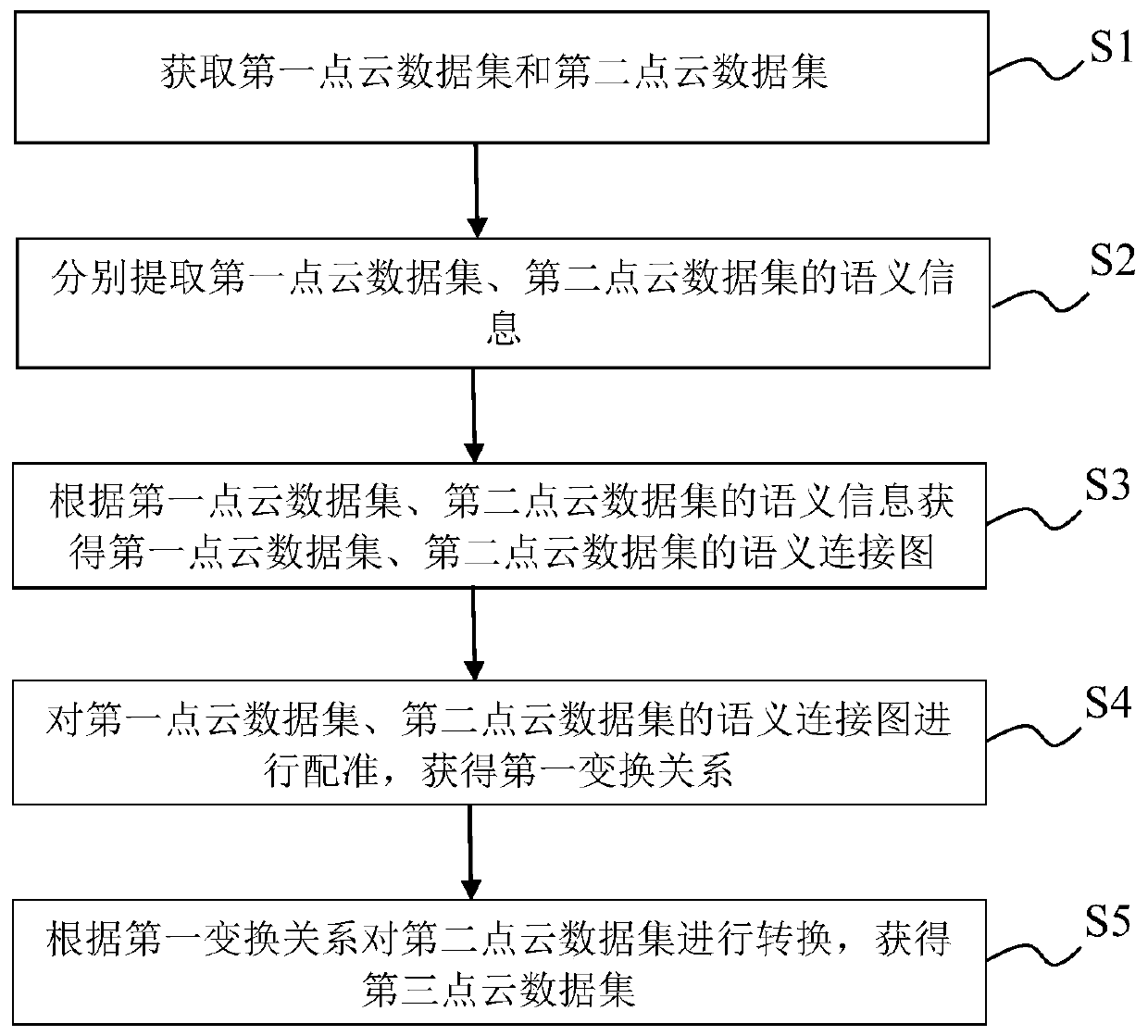
[0055] refer to figure 1 , the registration method of the point cloud data in the present embodiment comprises steps:
[0056] S1. Obtain a first point cloud dataset and a second point cloud dataset.
[0057] Specifically, the first point cloud data set and the second point cloud data set respectively correspond to two images under different viewing angles in the target space, and the two images partially overlap, that is, the first point cloud data set and the second point cloud data set have overlapping area. The data points in the first point cloud dataset and the second point cloud dataset are all three-dimensional data points, and the first point cloud dataset and the second point cloud dataset can be directly obtained by a depth image sensor, for example, directly scanned by a laser radar can also be obtained after conversion through the depth image conversion method.
[0058] S2. Extract semantic information of the first point cloud dataset and the second point cloud...
Embodiment 2
[0104] The difference between this embodiment and Embodiment 1 is that the first point cloud data set and the second point cloud data set in this embodiment include multiple objects respectively, and the categories of multiple objects are the same, because these objects cannot be classified by category Therefore, the semantic information in this embodiment is the shape of the object. The object in this embodiment can have a grid-like or other similar grid-like repeating structure, or it can be an object with a specific shape, such as , spheres, cuboids, cylinders, cones, etc., when extracting semantic information, you can obtain repetitive structures of the same category or objects with specific shapes by extracting based on repetitive structures or special structures.
[0105] In this embodiment, except that steps S2 and S4 are different from those in Embodiment 1, other steps are the same as in Embodiment 1 and will not be repeated here. Steps S2 and S4 in this embodiment wil...
Embodiment 3
[0120] refer to Figure 7 , this embodiment also provides a point cloud data registration system, the registration system includes a first acquisition module 1 , an extraction module 2 , a second acquisition module 3 , a registration module 4 , and a conversion module 5 .
[0121] Specifically, the first acquisition module 1 is used to acquire the first point cloud data set and the second point cloud data set, and the extraction module 2 is used to respectively extract the semantic information of the first point cloud data set and the second point cloud data set. The second acquisition module 3 is used to obtain the semantic connection graphs of the first point cloud data set and the second point cloud data set respectively according to the semantic information of the first point cloud data set and the second point cloud data set, and the registration module 4 is used for The semantic connection graph of the first point cloud data set and the second point cloud data set is reg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More