

Power-assisted walking and auxiliary supporting mechanism
An auxiliary support and power-assisted technology, which is applied in the direction of appliances that help people walk, manipulators, program-controlled manipulators, etc., can solve problems such as hydraulic drive self-heaviness, pneumatic muscle damage, and difficulty in precise control, so as to increase service life and protect human joints , Improve the effect of smoothness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
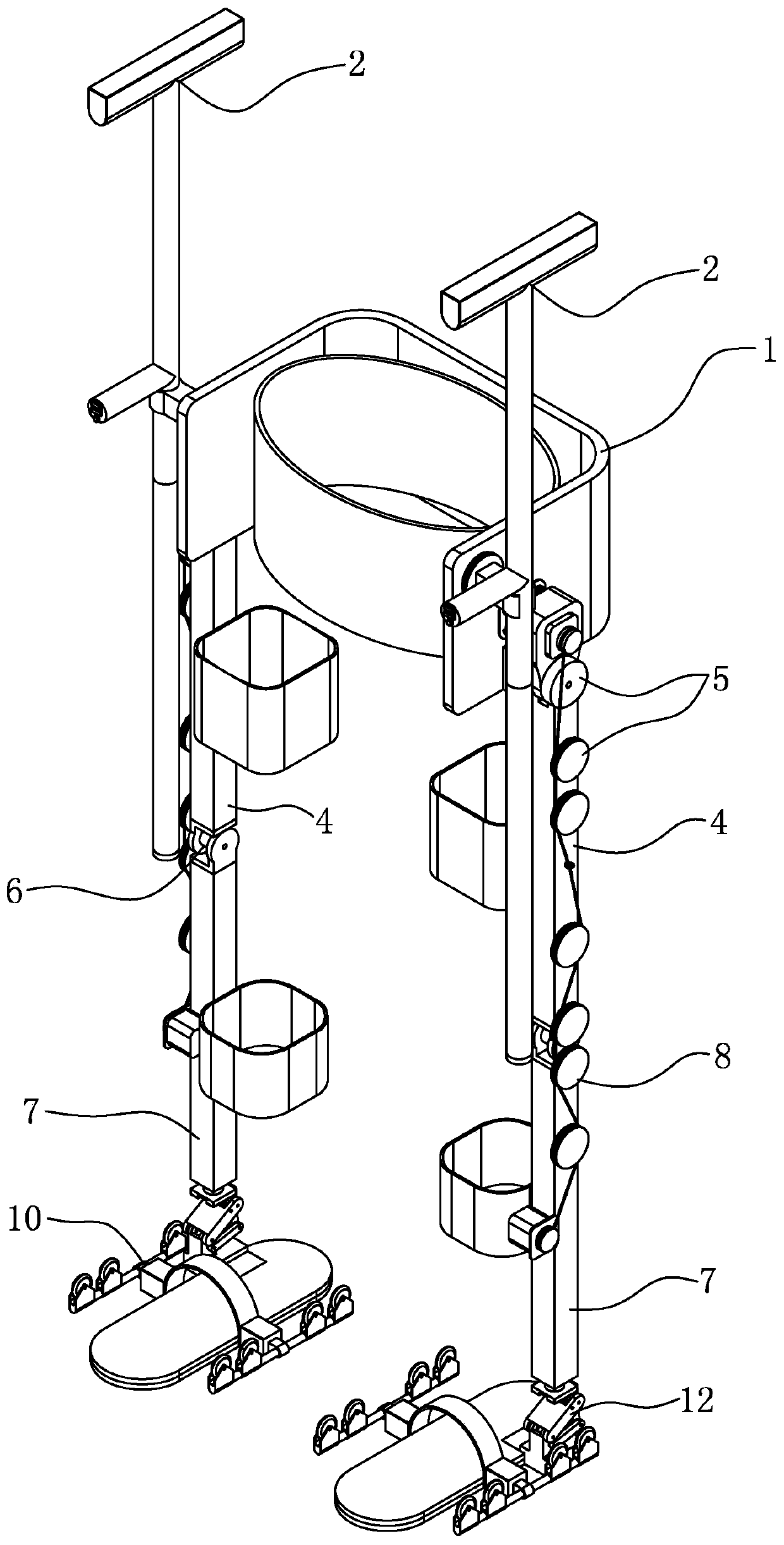
[0037] see Figure 1-Figure 16 As shown, a kind of power-assisted walking and auxiliary support mechanism of the present embodiment includes a left leg, a right leg, a foot, a waist wearing module 1 and an auxiliary support telescopic rod 2, the left leg and the right leg have the same structure, and the left leg and the right feet 10 are mounted on the legs respectively;
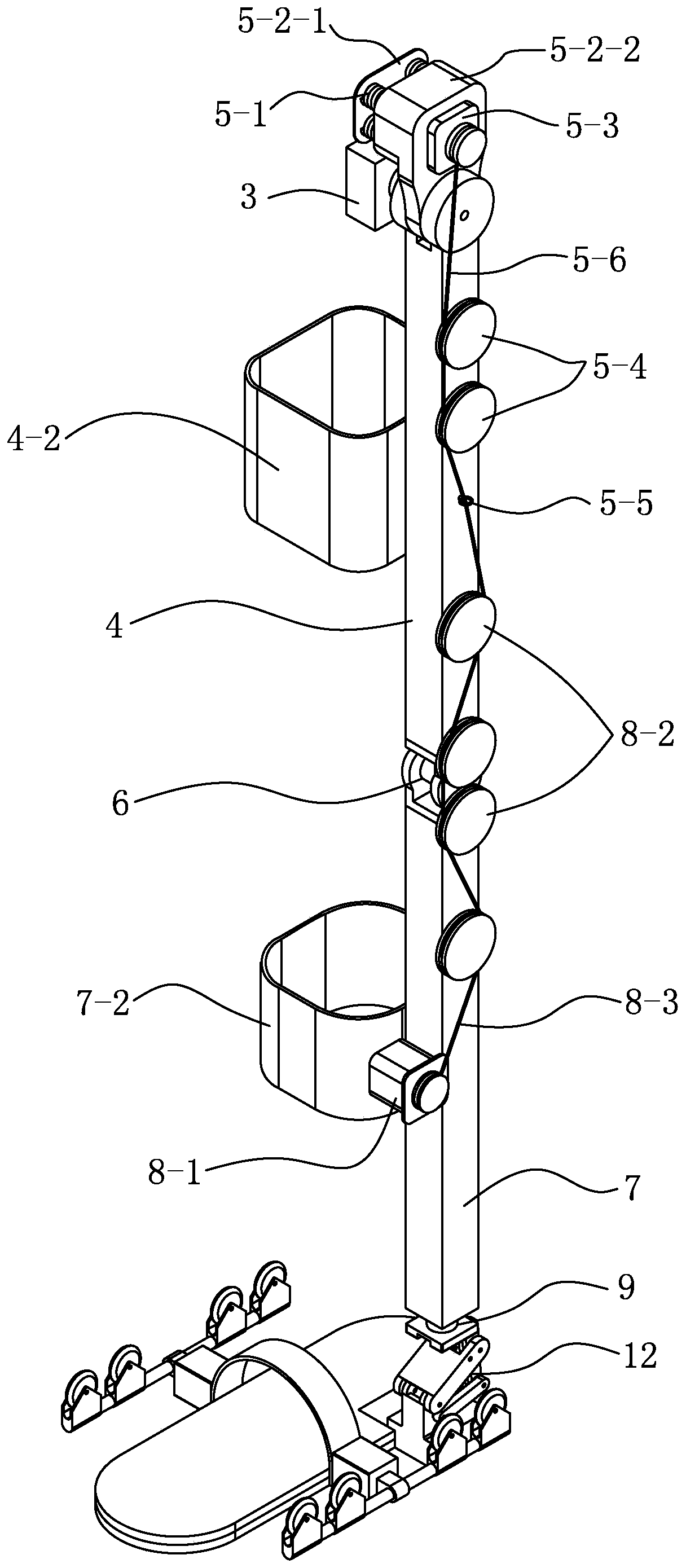
[0038] The left leg and the right leg respectively include a hip joint connector 3, a thigh support rod 4, a thigh rope drive mechanism 5, a knee joint connector 6, a calf support rod 7, a calf rope drive mechanism 8, and an ankle joint connector 9 And the shock absorption module 12, the hip joint connector 3 is connected with the waist wearing module 1; the thigh support rod 4 is connected with the hip joint connector 3 and the two can rotate relatively;
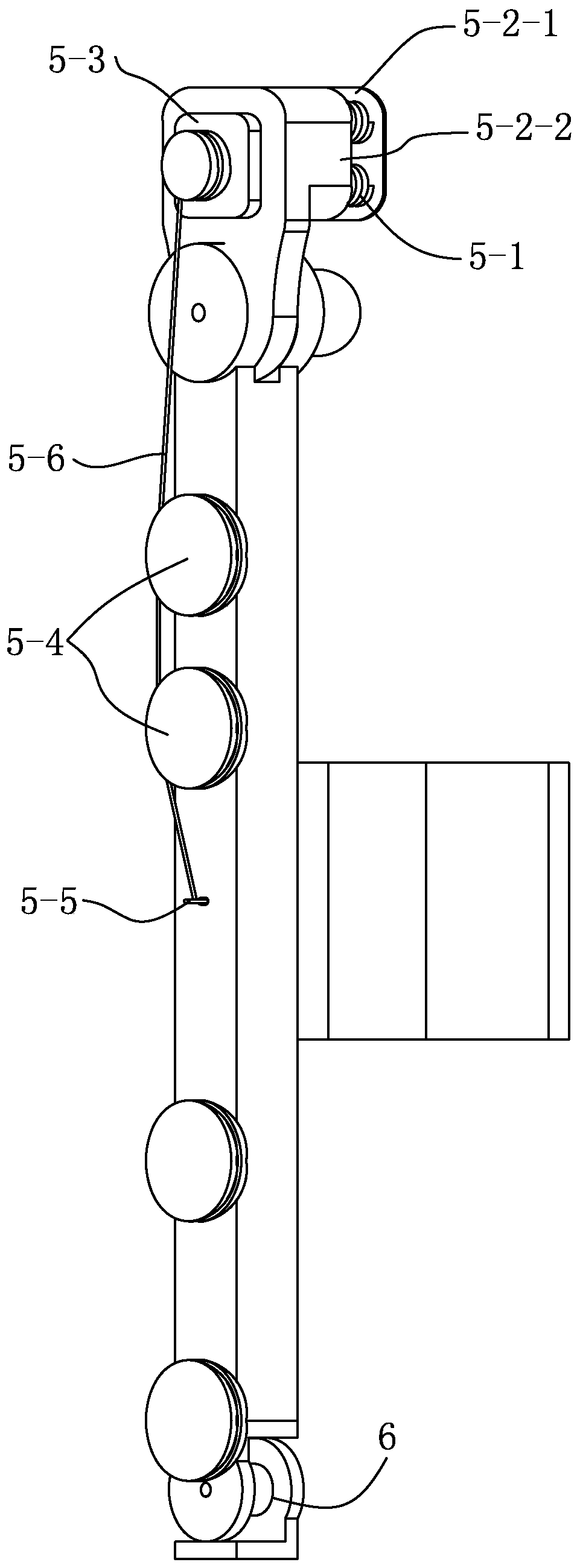
[0039]The thigh rope driving mechanism 5 includes a spring 5-1, a movable seat, a first motor 5-3, a first pulley block 5-4 and a first transmission ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More