

Magnetofluid-driven inchworm-like soft robot
A magnetic fluid and robot technology, applied in manipulators, program-controlled manipulators, additive manufacturing, etc., can solve problems such as changing its own shape and size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
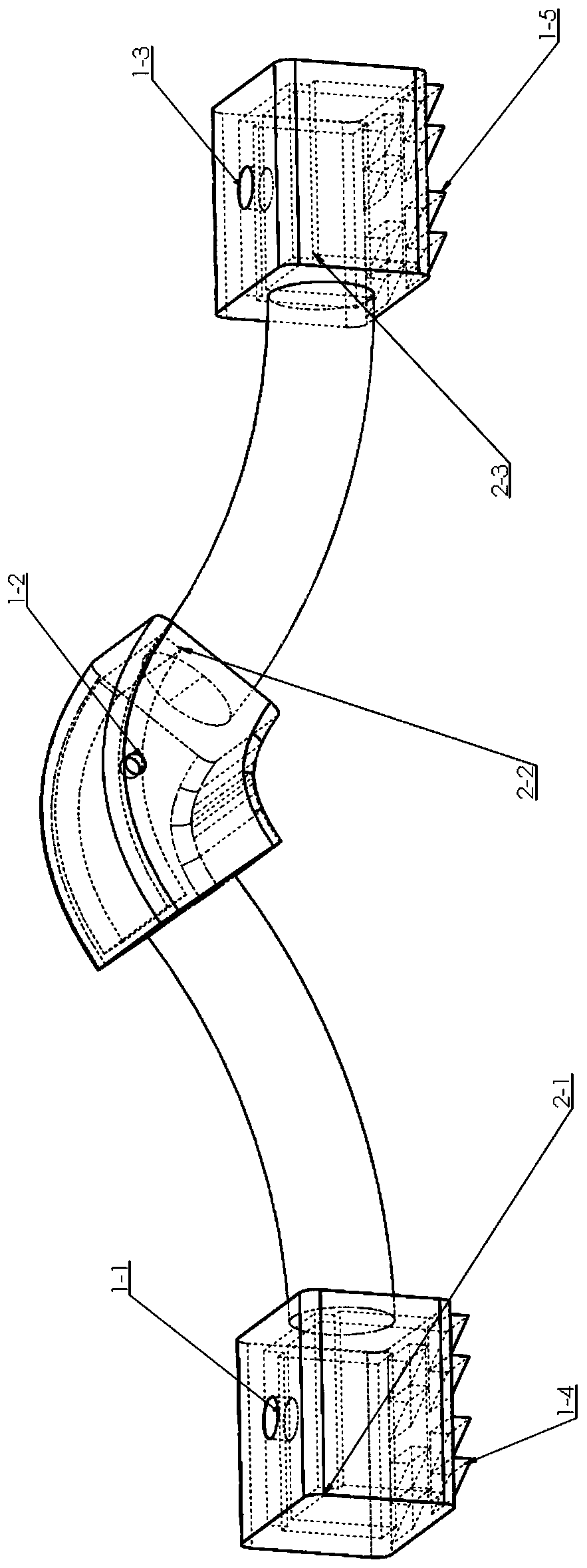
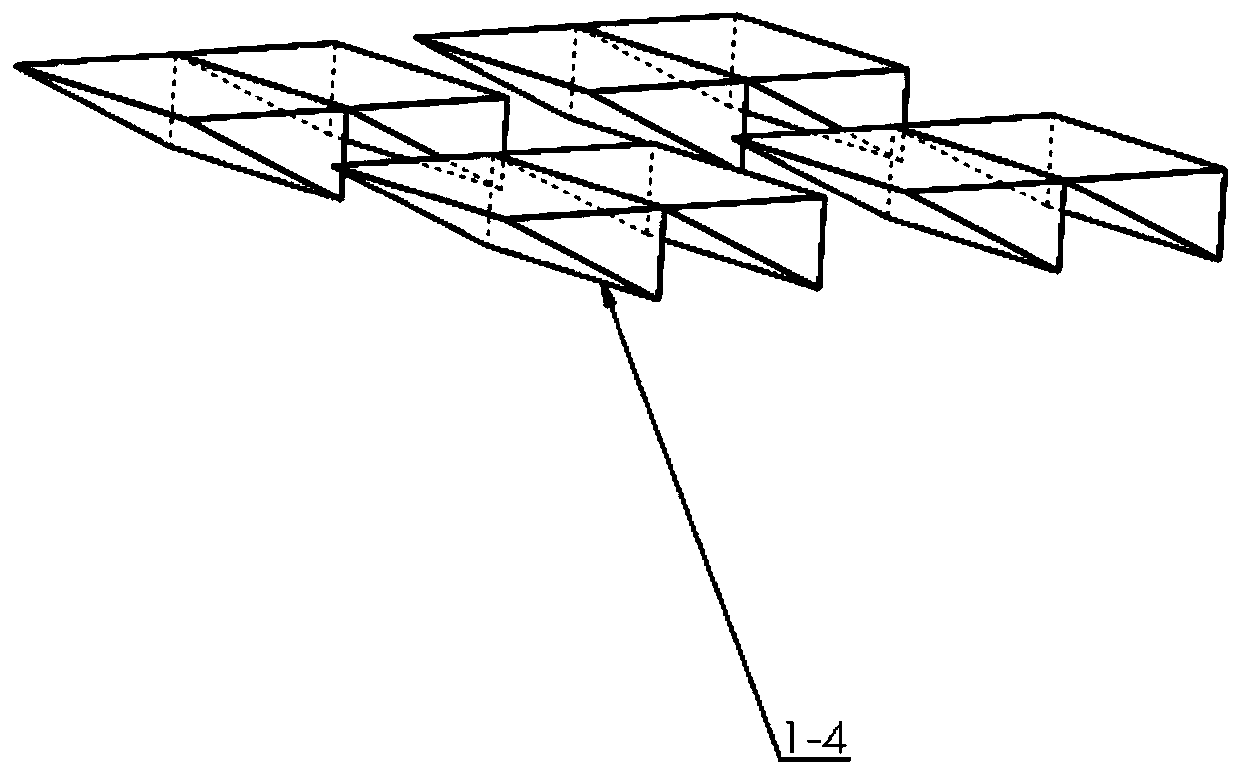
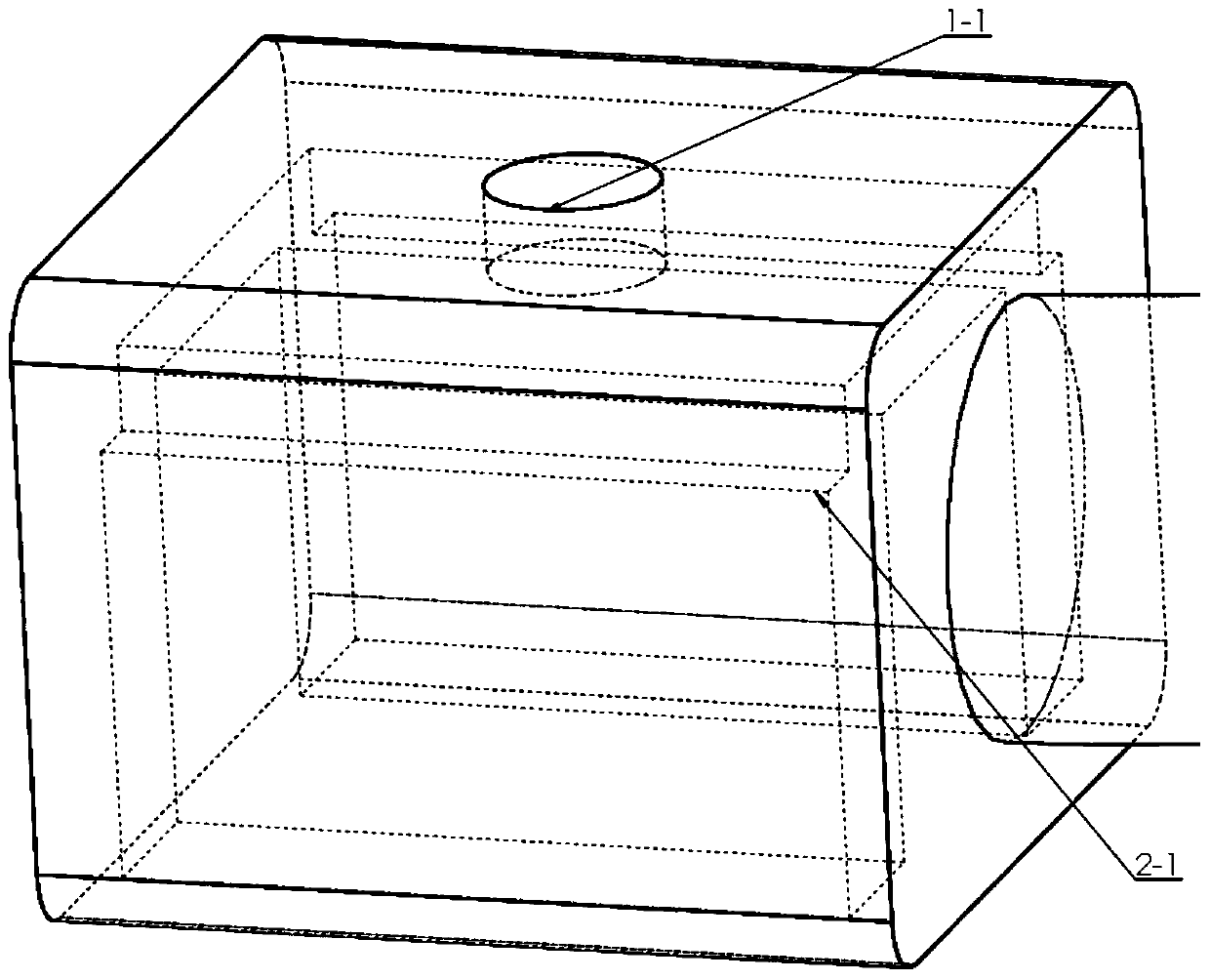
[0027] The design process of the three-dimensional model of the soft robot is: using Solidworks software to design the three-dimensional model of the robot imitating the inchworm robot driven by magnetic fluid, the model includes a head part, a torso part and a tail part, such as figure 1 shown. The size of the head part and the tail part is 20mmX20mmX30mm, the cross-sectional diameter of the two solid tubular torsos is 10mm, and the arc length is 40mm. . Such as figure 1 , figure 2 , image 3 , Figure 4 As shown, footing groups 1-4 and 1-5 with triangular cross-sections are respectively arranged on the bottom surface of the head part and the tail part, wherein 2 triangular prisms (4mmX2mmX4mm) form a group, and the bottom surfaces of the head part and the tail part are respectively arranged 4 groups, all the triangles have the same orientation, and are used for crawling on the ground. The head part and the tail part are respectively provided with a head cavity 2-1 and...
Embodiment 2
[0029] The 3D printing manufacturing process of the inchworm-like soft robot is: using polyurethane acrylate (PUA) and 2,4,6 (trimethylbenzoyl) diphenylphosphine oxide (TOP) as prepolymers of photosensitive resins respectively and photoinitiator, the two are deployed into photosensitive resin with a mass fraction of 95% and 5%; the slice thickness of the 3D printer printing model is set to be 0.1mm, and the designed three-dimensional model is imported into the 3D printing device (preheated to 30 ° C to start Printing, automatic heating to 35°C to maintain a constant temperature, laser characteristics: EN 60825-1:2007 certified Class 1 laser product 405nm violet laser, 250mW laser; laser spot size: 140μm; peeling mechanism: wiper sliding peeling process), completed Forming of the overall structure of the soft robot (printing time depends on the size of the model and its structural complexity). After the printing is completed, take out the elastic body and go through cleaning, w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More