

Crawler-type magnetic adsorption detection robot walking mechanism
A traveling mechanism and magnetic adsorption technology are applied in the field of underground comprehensive pipe gallery detection devices, which can solve the problems of high labor intensity, vertical pipes cannot be guaranteed to walk close to the pipe wall, and the detection effect is not ideal, so as to enhance the driving stability. , to achieve the effect of communication and self-powering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
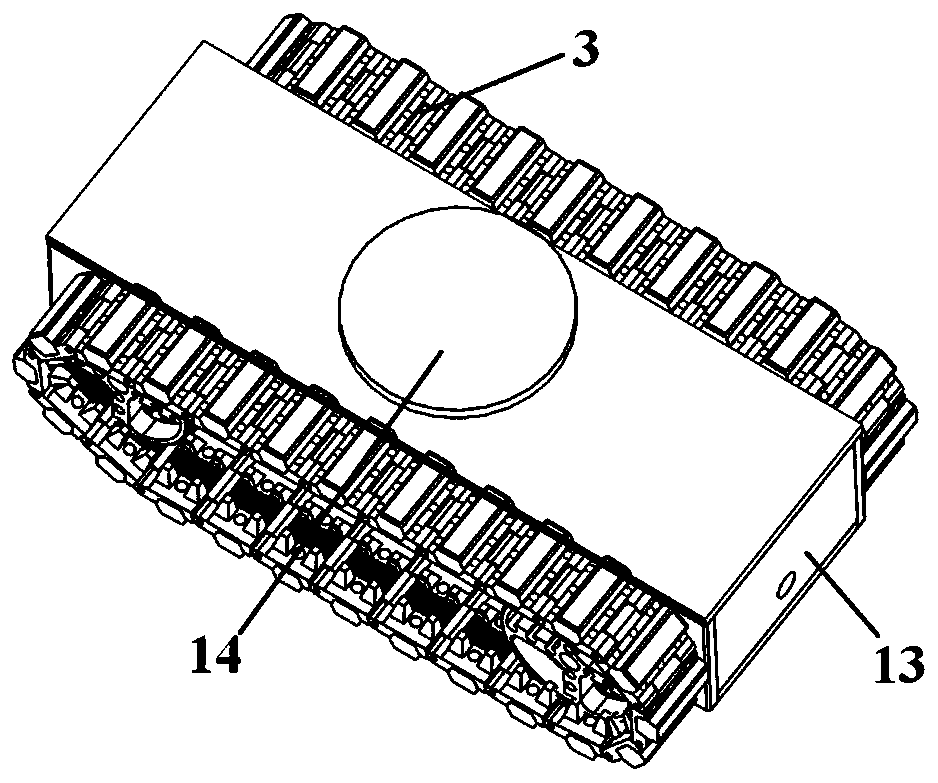
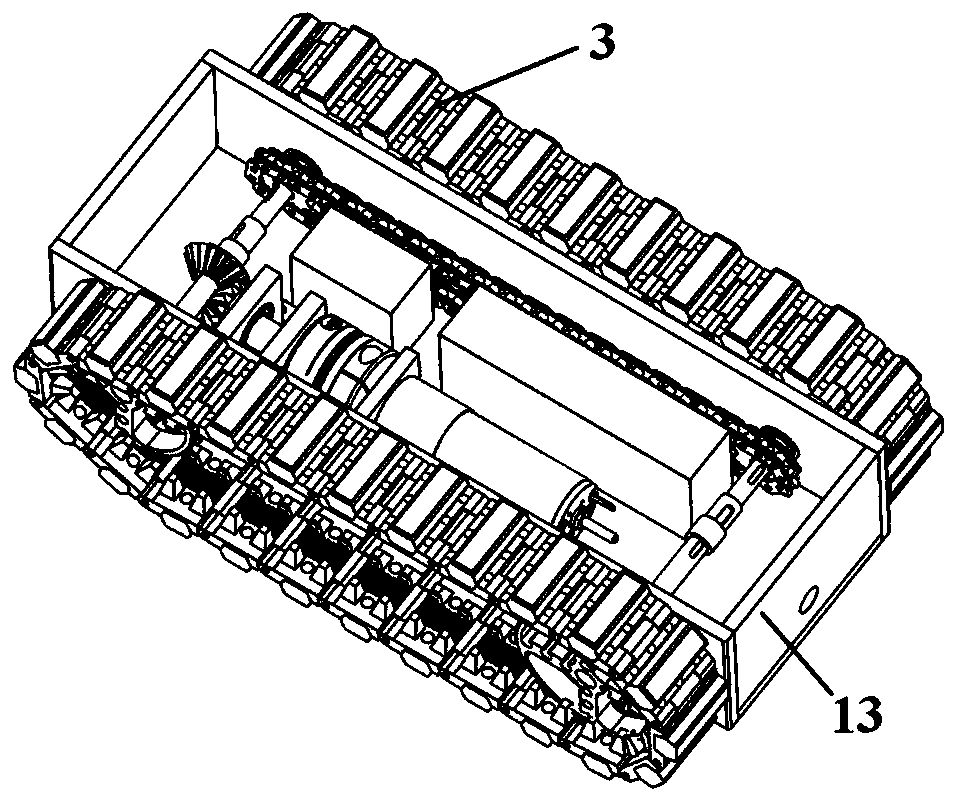
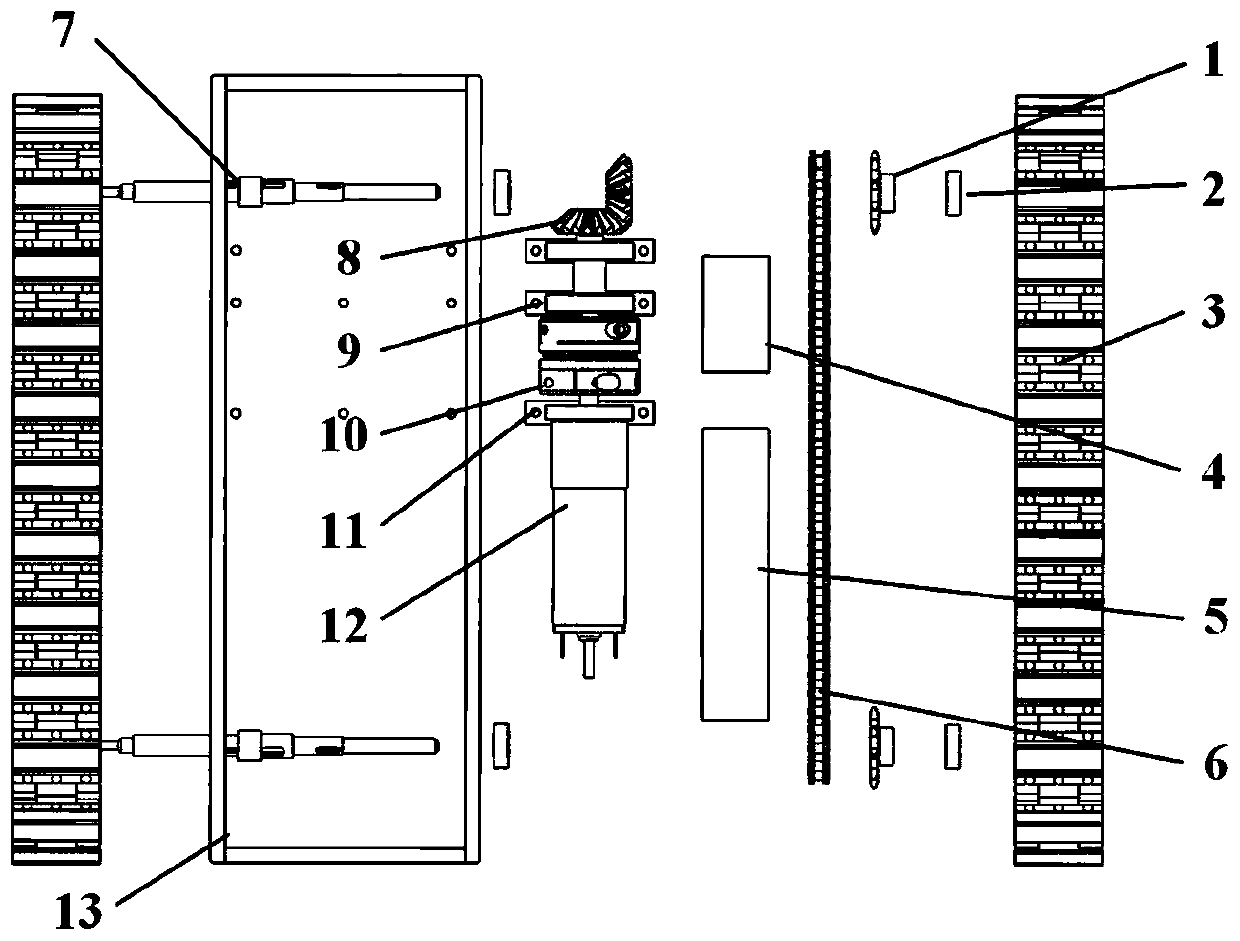
[0031] The crawler-type magnetic adsorption detection robot walking mechanism of the present invention comprises a sprocket 1, a first bearing 2, a crawler 3, a communication module 4, a power supply module 5, a chain 6, a power output shaft 7, a bevel gear 8, a bearing seat 9, a coupling Shaft device 10, motor base 11, motor 12, housing 13, sensor and detection mechanism base 14. specifically,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More