

Whole body movement planning method and system of robot
A robot and motion planning technology, applied in manipulators, program-controlled manipulators, and manufacturing tools, etc., can solve the problems of poor applicability, high communication requirements, and large amount of data calculation, achieving strong applicability, reducing the amount of data calculation, The effect of improving the efficiency of whole body action planning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. The present invention is not limited to this embodiment, and other embodiments may also belong to the scope of the present invention as long as they conform to the gist of the present invention.
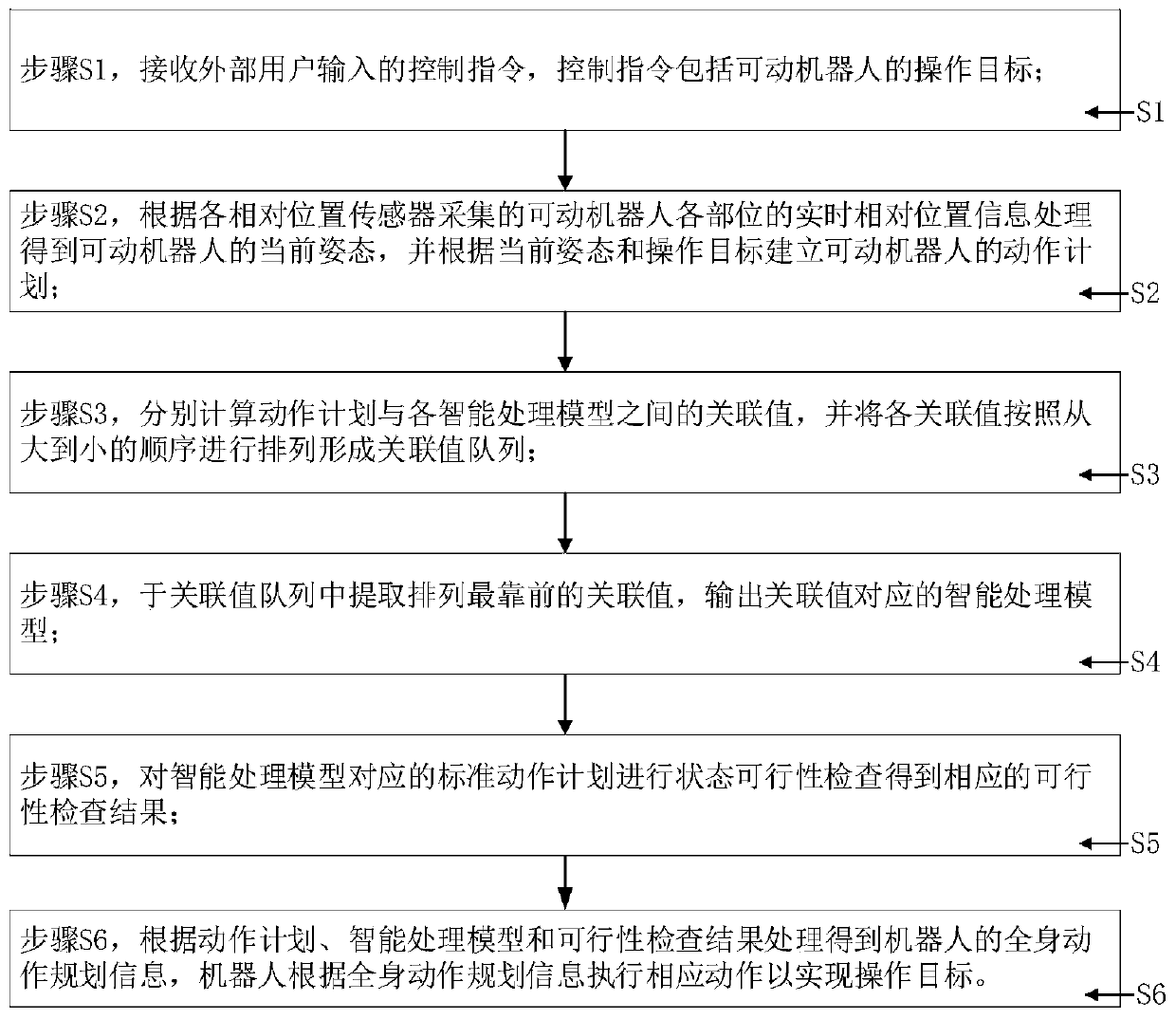
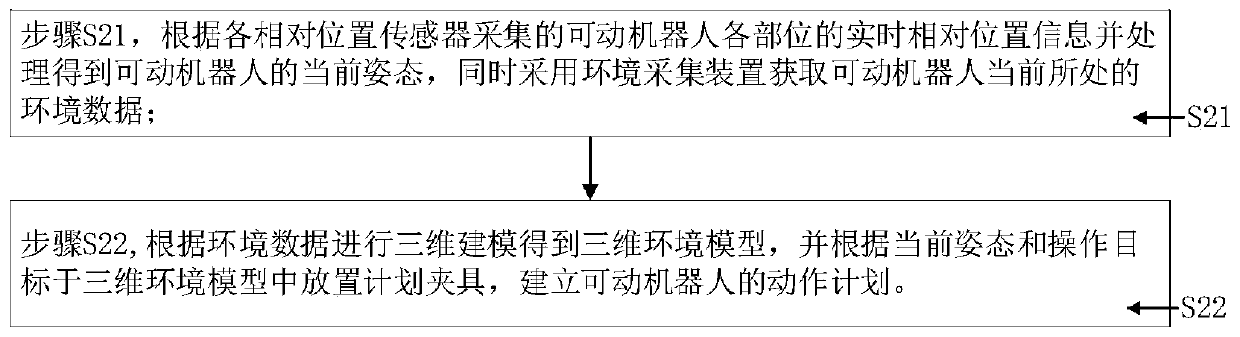
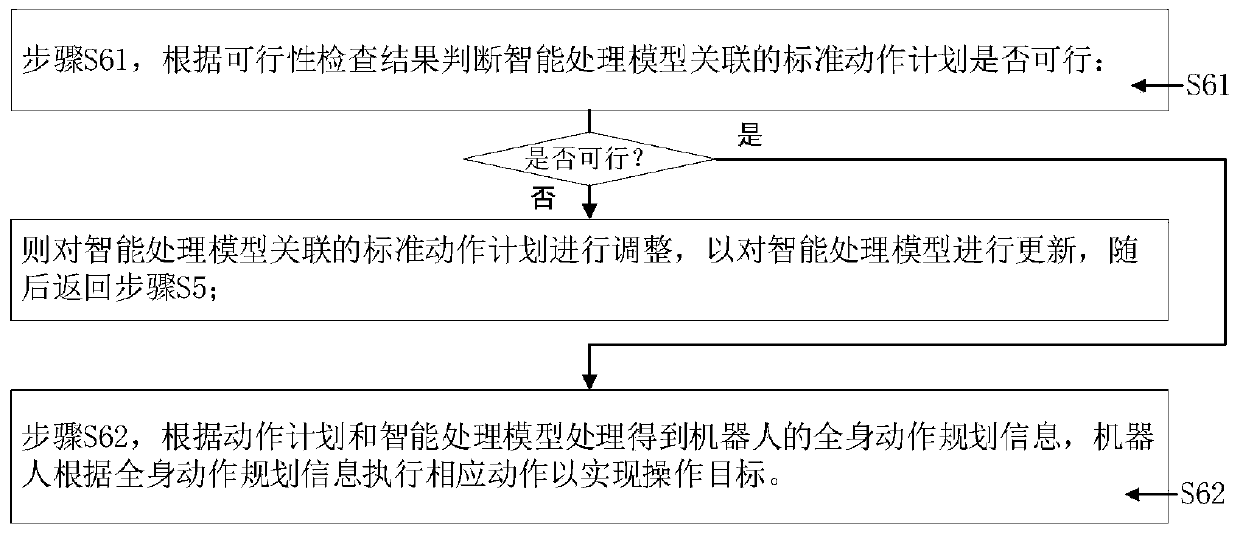
[0045] In a preferred embodiment of the present invention, based on the above-mentioned problems existing in the prior art, a whole-body motion planning method for a robot is provided, which is applied to a mobile robot. The mobile robot includes a main body and at least two mechanical limbs. The main body and each mechanical limb are provided with at least one relative position sensor; the mobile robot obtains multiple intelligent processing models through artificial intelligence learning, and each intelligent processing model is associated with a class of standard action plans;
[0046] Such as figure 1 As shown, the robot whole-body motion plannin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More