Full-coverage path planning method for unmanned aerial vehicle
A path planning, UAV technology, applied in vehicle position/route/altitude control, non-electric variable control, instruments, etc., can solve the problems of complex UAV full coverage path planning, low precision, and large error.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
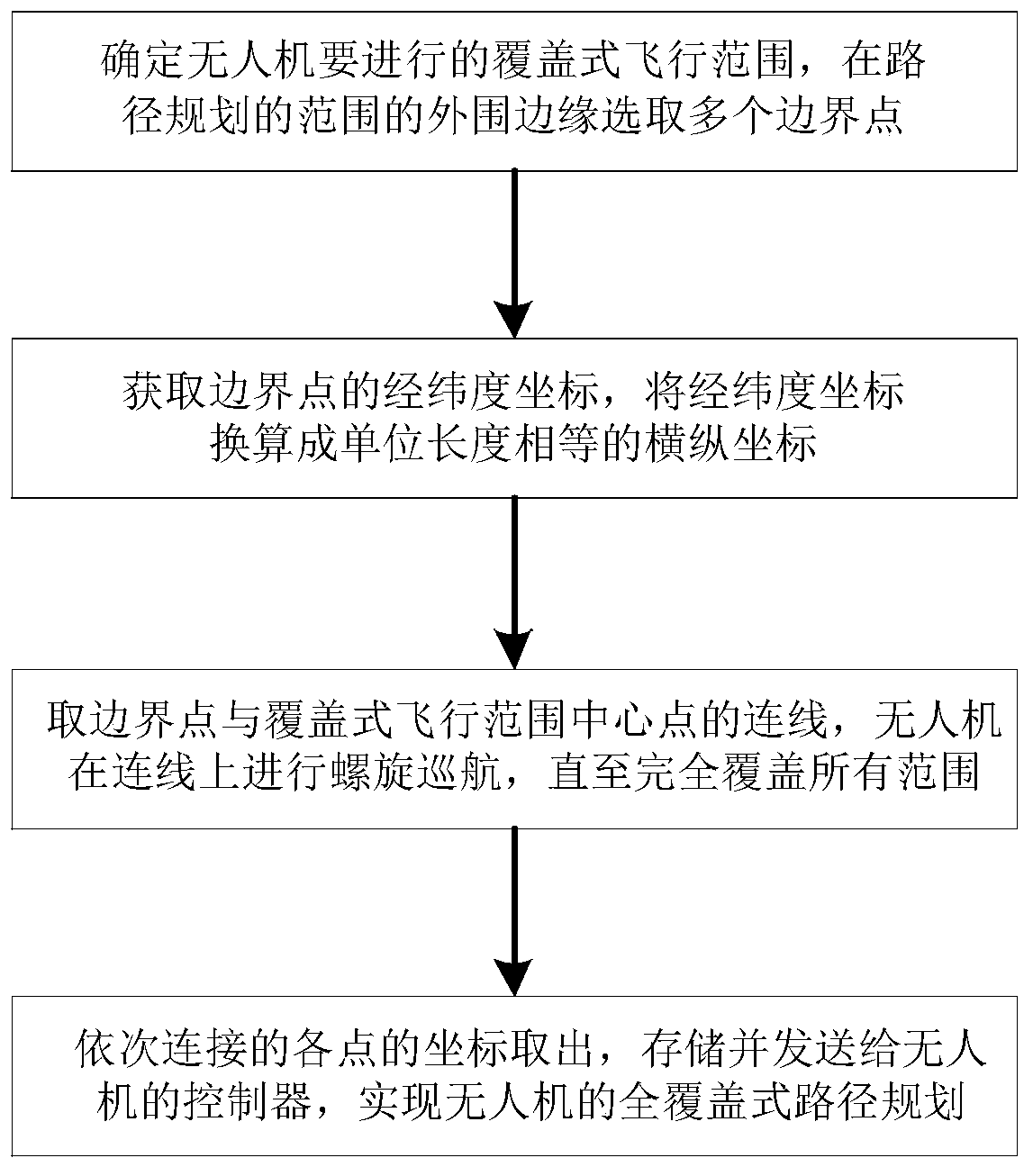
[0040] refer to figure 1 , this embodiment discloses a UAV full-coverage path planning method, the method is:
[0041] Determine the coverage flight range to be carried out by the UAV, and select multiple boundary points on the outer edge of the path planning range;
[0042] Obtain the latitude and longitude coordinates of the boundary point, and convert the latitude and longitude coordinates into horizontal and vertical coordinates with equal unit length;
[0043] Take the connection line between the boundary point and the center point of the covered flight range, and the UAV performs spiral cruise on the connection line until it completely covers all the range;
[0044] The coordinates of each point connected in sequence are taken out, stored and sent to the controller of the drone to realize the full-coverage path planning of the drone.
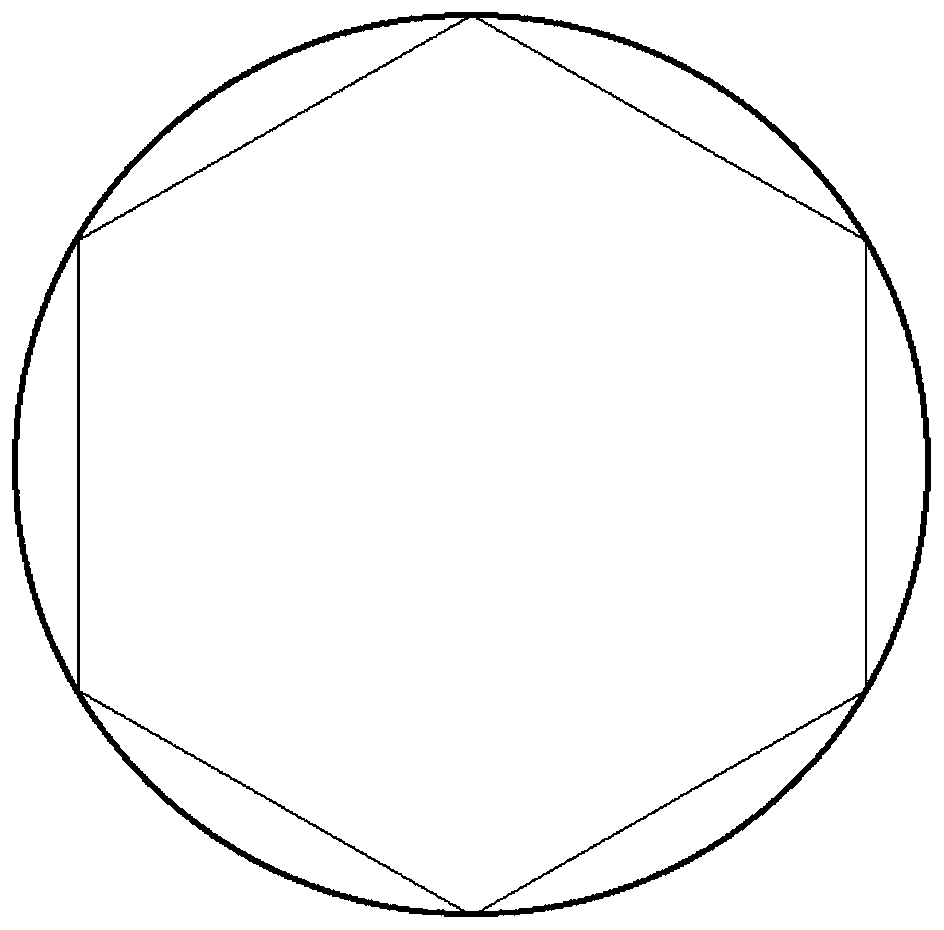
[0045] refer to figure 2, the perimeter of the covering flight range to be carried out by the UAV is s meters, a boundary point is se...
Embodiment 2
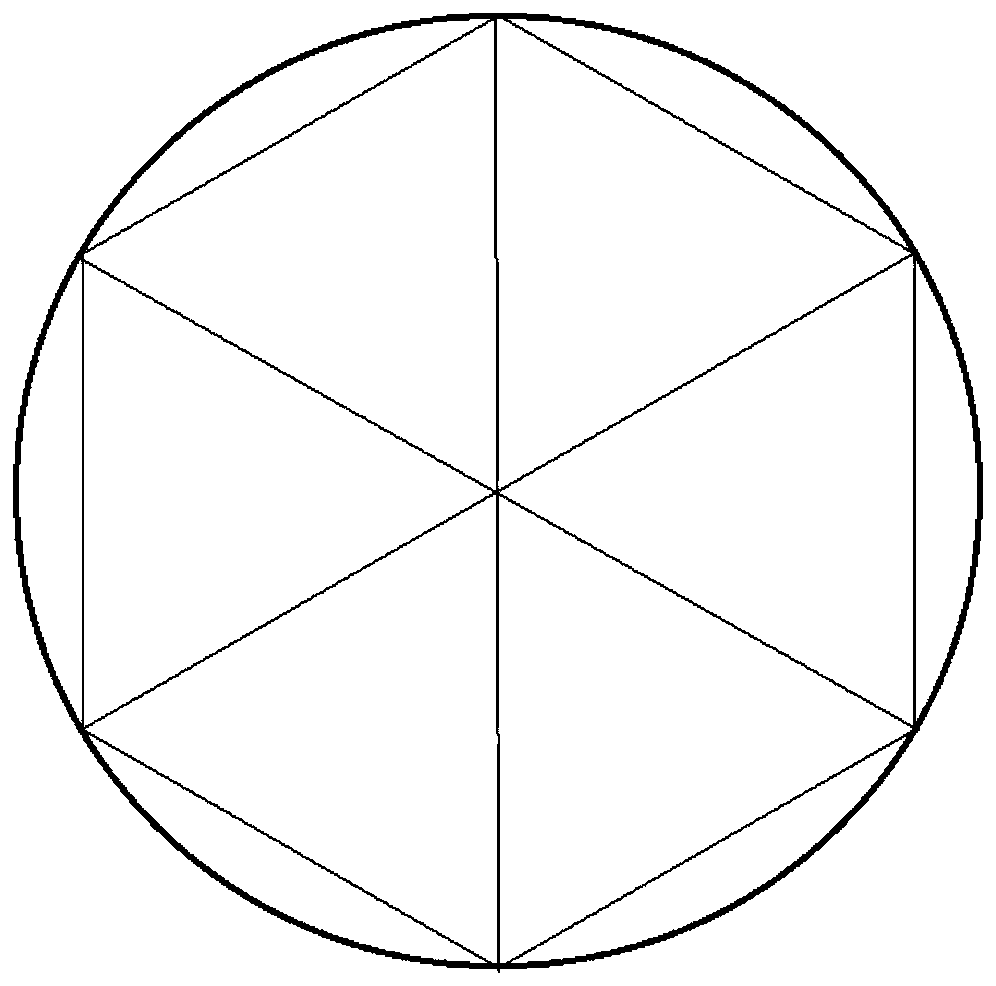
[0058] refer to Figure 6 , this embodiment discloses a full-coverage path planning method for unmanned aerial vehicles. The perimeter of the covered flight range to be carried out by the unmanned aerial vehicle is set to be s meters, and a boundary point is selected every x meters distance, and a total of i Points, obtain the latitude and longitude coordinates of i points through the positioning system, (j1, w1), (j2, w2)...(ji, wi), and then convert the latitude and longitude coordinates into horizontal and vertical coordinates with equal unit length, k∈( 1~i),
[0059] x k = j k ×cosw k ,
[0060] the y k =w k
[0061] Connect two adjacent points into a line segment (that is, the boundary line), and get the expression
[0062] I1: If x1
[0063] y=a 1 ×x+b 1
[0064] I2: If x2
[0065] y=a 2 ×x+b 2
[0066] ....., ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More