

Monocular perception correction method, device and storage medium based on sparse point cloud
A sparse point, monocular technology, applied to devices and storage media, in the field of monocular perception correction methods based on sparse point clouds, can solve the problems of high algorithm complexity and large deviation of target depth estimation, and achieves low algorithm complexity and improved performance. effect, the effect of reducing estimation bias
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make those skilled in the art better understand the solutions of the present invention, the technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only Embodiments are part of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of the present invention.
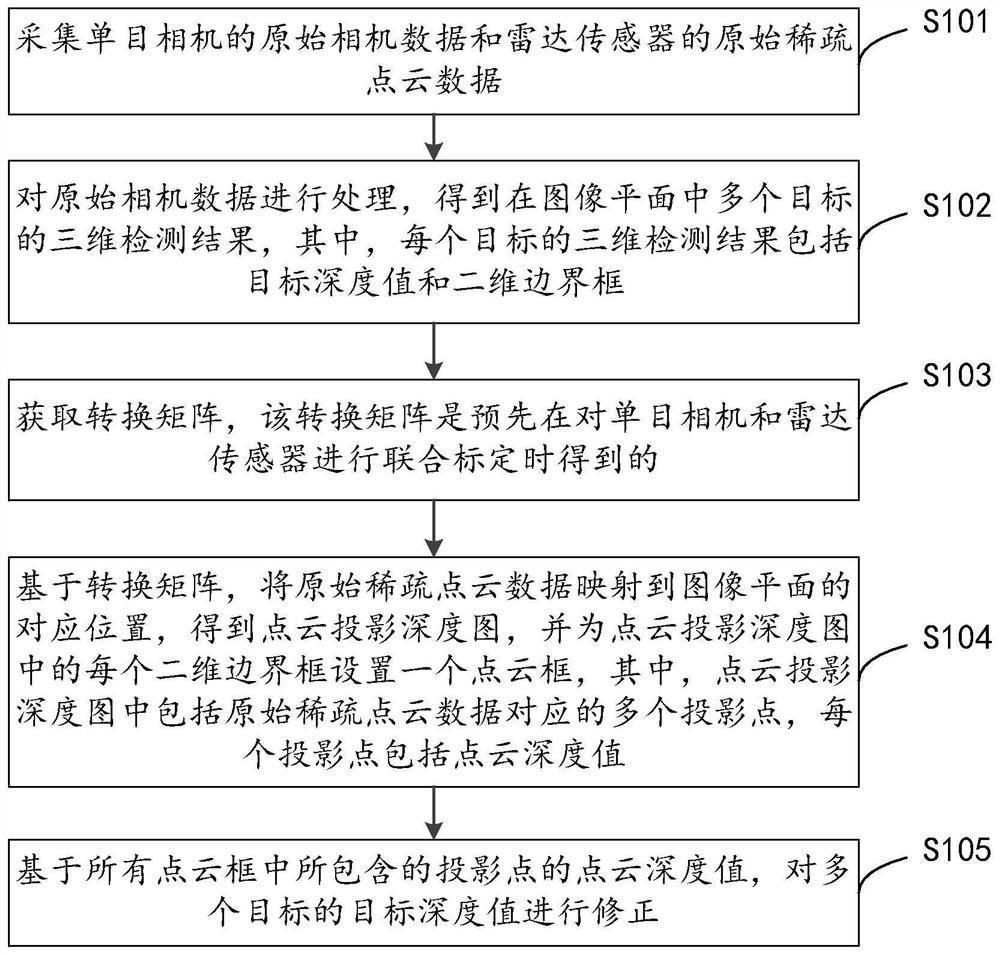
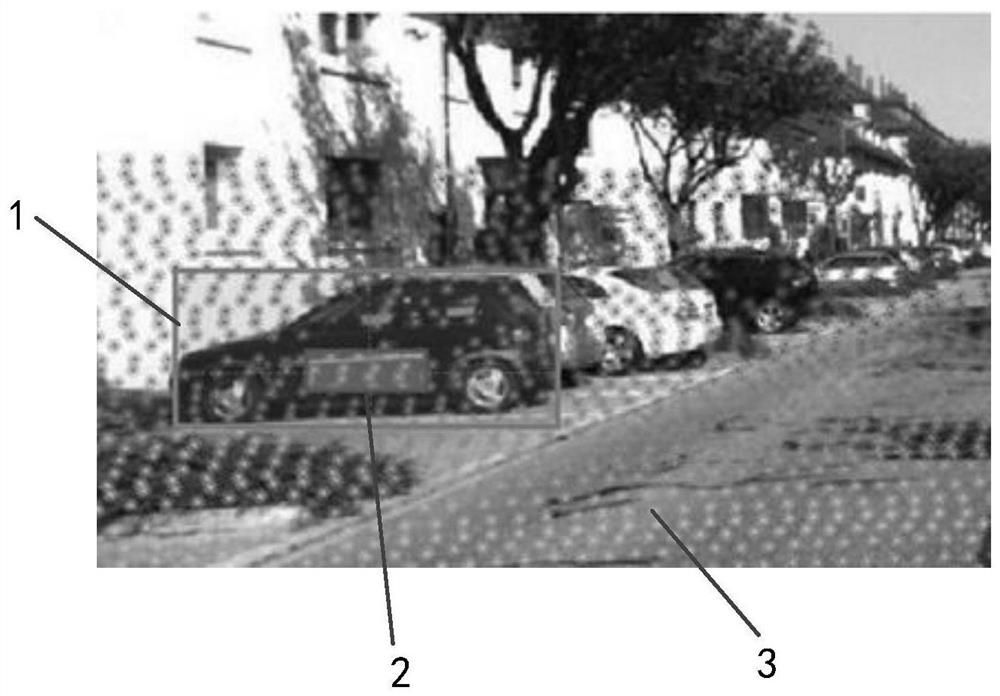
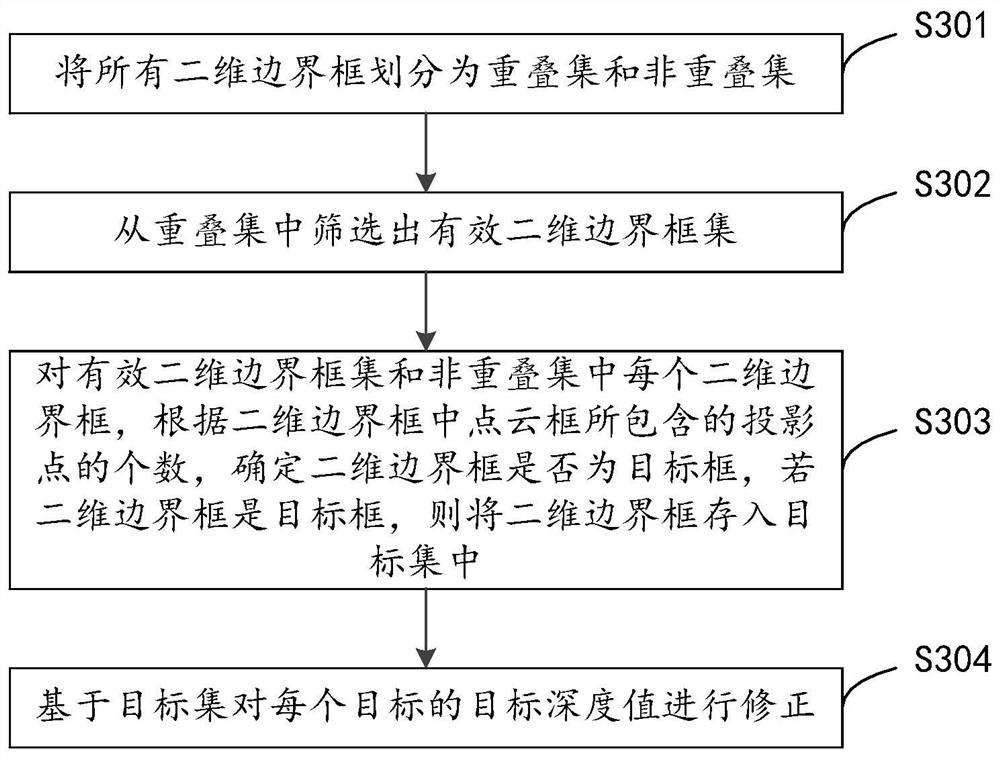
[0031] Intelligent perception is an important part of automatic driving, and the measurement of obstacle distance is one of the basic tasks of 3D perception. The 3D target detection method based on sparse point cloud will lose a lot of outline or detail information due to the sparseness of point cloud, and the detection effect It is relatively ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More