

Exoskeleton leg length adjusting mechanism
A technology of length adjustment and exoskeleton, which is applied in the field of rehabilitation robots, can solve the problems that the length of the patient's legs cannot be fully adapted, and the stepless adjustment mechanism cannot be completely locked, so as to achieve simple and convenient maintenance and replacement of parts, and a simple structure , Push-pull operation is easy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
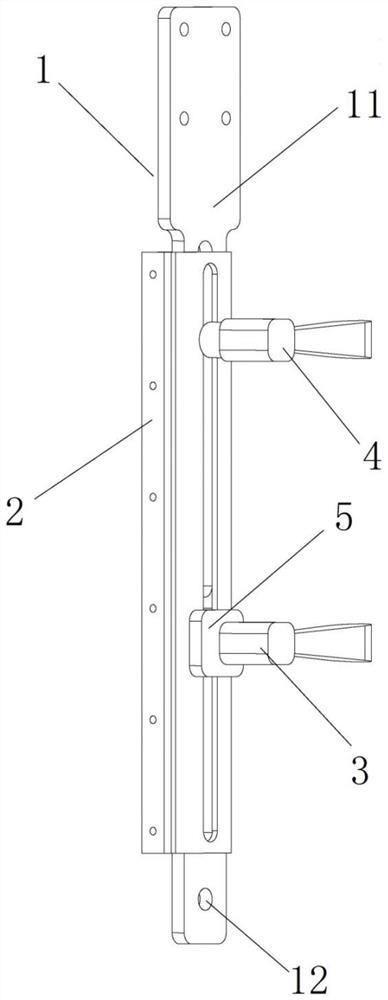
[0019] see Figure 1-2 , the present embodiment provides an exoskeleton leg length adjustment mechanism, including a thigh rod 1, the thigh rod 1 has a rectangular cross-section, and the thigh rod 1 is divided into two parts: an upper thigh rod 11 and a lower thigh rod 12. The thigh bar 11 is connected with the lower thigh bar 12 through a U-shaped sleeve 2, specifically the upper thigh bar 11, the lower thigh bar 12 and the U-shaped sleeve 2 are all provided with a strip notch, and the lower thigh bar 12 is nested into the U-shaped sleeve 2, and the long notch on the lower thigh bar 12 cooperates with the long notch on the U-shaped sleeve 2 to connect through the first push-pull quick clamp 3, that is The first push-pull quick clamp 3 connects the lower thigh rod 12 and the U-shaped sleeve 2 through the elongated notch on the lower thigh rod 12 and the U-shaped sleeve 2; the upper thigh rod 11 is nested Put it into the U-shaped sleeve 2, and the long notch on the upper thigh...
Embodiment 2
[0021] The exoskeleton leg length adjustment mechanism provided in this embodiment has the same general structure as that of Embodiment 1, the difference is that a spacer 5 is added to the first push-pull quick clamp 3 and the second push-pull quick clamp 4, Such as figure 1 shown for increased clamping force.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More