

Rotation matrix calibration method based on transverse moving motion in TCP coordinate system
A technology of rotation matrix and translational movement, applied in the field of robotics, can solve problems such as unfavorable production and processing, complex conversion equations, etc., and achieve the effects of avoiding clamping errors, high calibration accuracy, and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] Embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings and examples. The following examples are used to illustrate the present invention, but should not be used to limit the scope of the present invention.
[0043] The implementation process of the present invention will be explained below in conjunction with the accompanying drawings, which involves some but not all of the content.
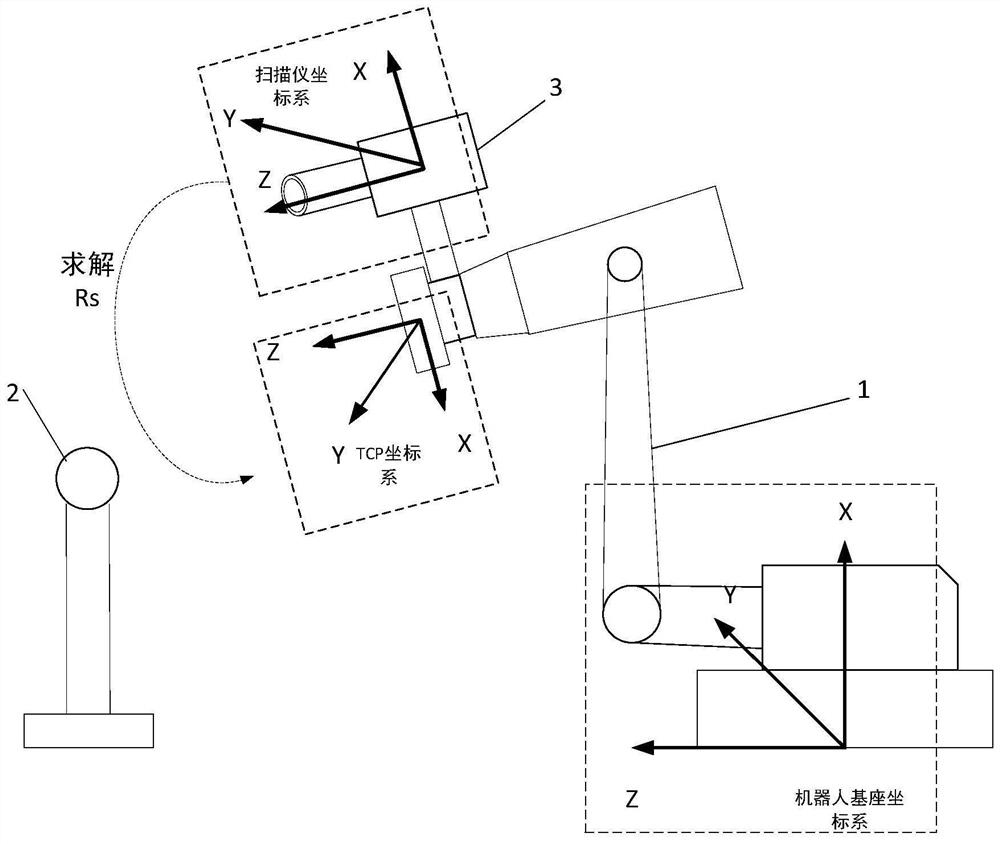
[0044] figure 1 Schematic diagram of the eye-on-hand calibration system used in the present invention, including a robot 1, a standard ball 2 and a scanner 3; wherein the standard ball 2 is fixed outside the robot 1, the scanner 3 is fixed at the end of the robot 1, and the coordinates of the robot 1 itself The system is recorded as the base coordinate system, the coordinate system at the end of the robot 1 is recorded as the TCP coordinate system, and there is a coordinate system on the scanner 3 carried at the end of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More