

Motion control method for machining three-dimensional free curved surface through robot
A robot processing and motion control technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problem of lack of a good robot motion control method, and achieve the effect of ensuring high-speed characteristics and ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
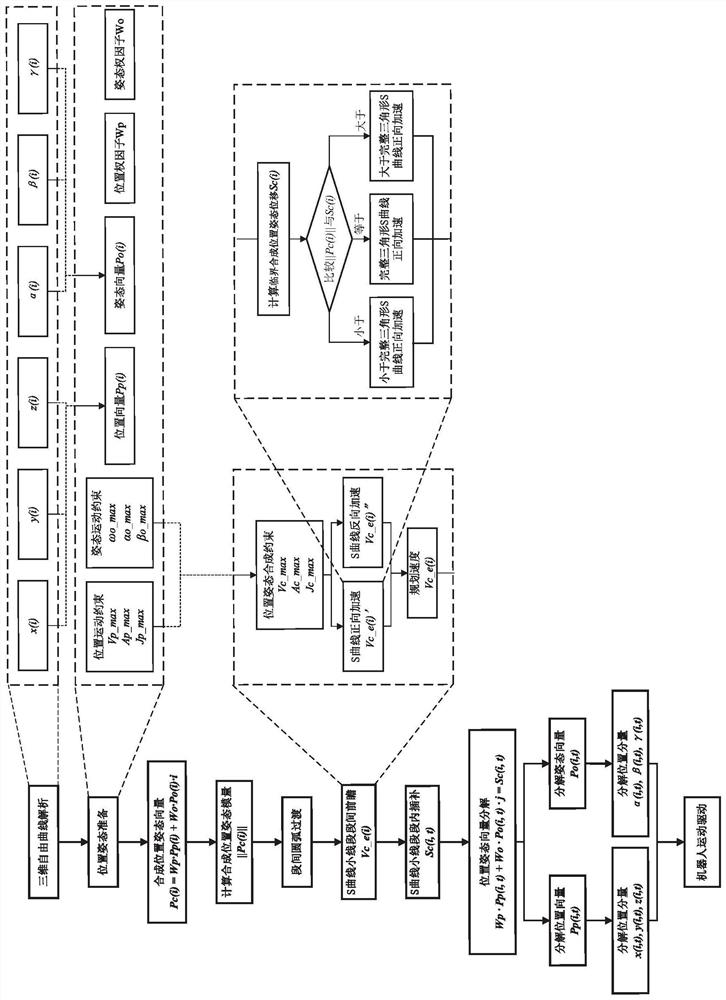
[0052] In a typical embodiment of the present application, in Example 1, a motion control method for machining a three-dimensional free-form surface by a robot includes the following steps:
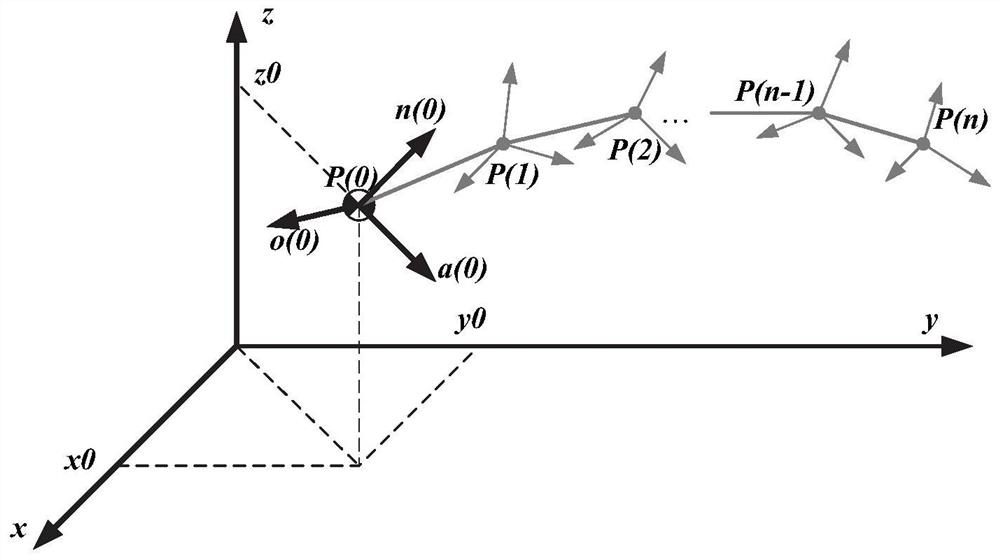
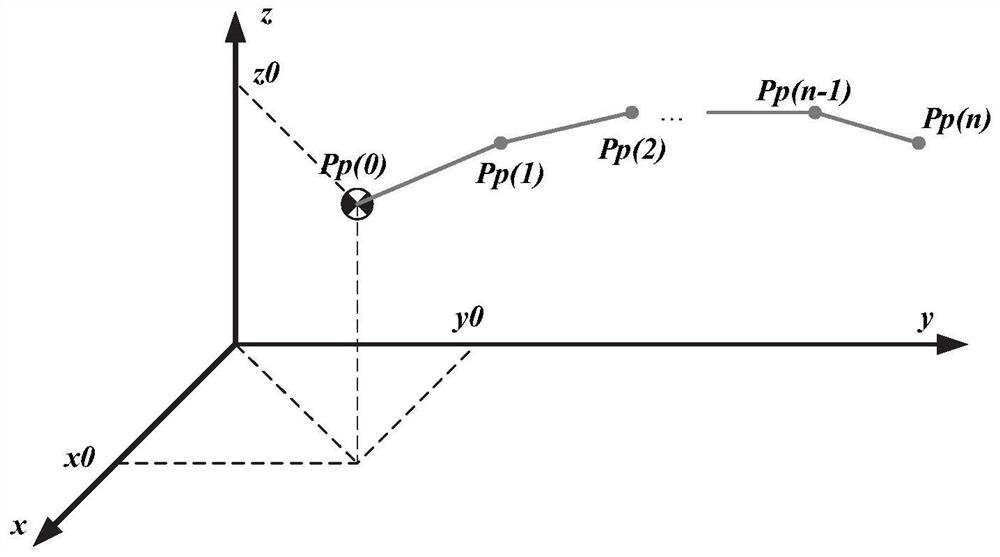
[0053] Step 1. Establish the position vector and attitude vector of each small line segment of the processing trajectory, and obtain the position weight factor and attitude weight factor according to the established position vector and attitude vector;
[0054] Step 2. Obtain the position and attitude synthesis vector according to the position weight factor and the attitude weight factor obtained, and obtain the position and attitude synthesis vector modulus according to the position and attitude synthesis vector;
[0055] Step 3. Forward-looking and interpolating the synthetic position and attitude vector corresponding to the small line segment to obtain the displacement of multiple interpolation points in the small line segment from the starting point of the small line segment; decompose...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More