A system state reverse estimation method of finite estimation interval is introduced
A technology for estimating intervals and system states, applied in complex mathematical operations, measuring devices, instruments, etc., can solve problems such as difficult application of forward estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
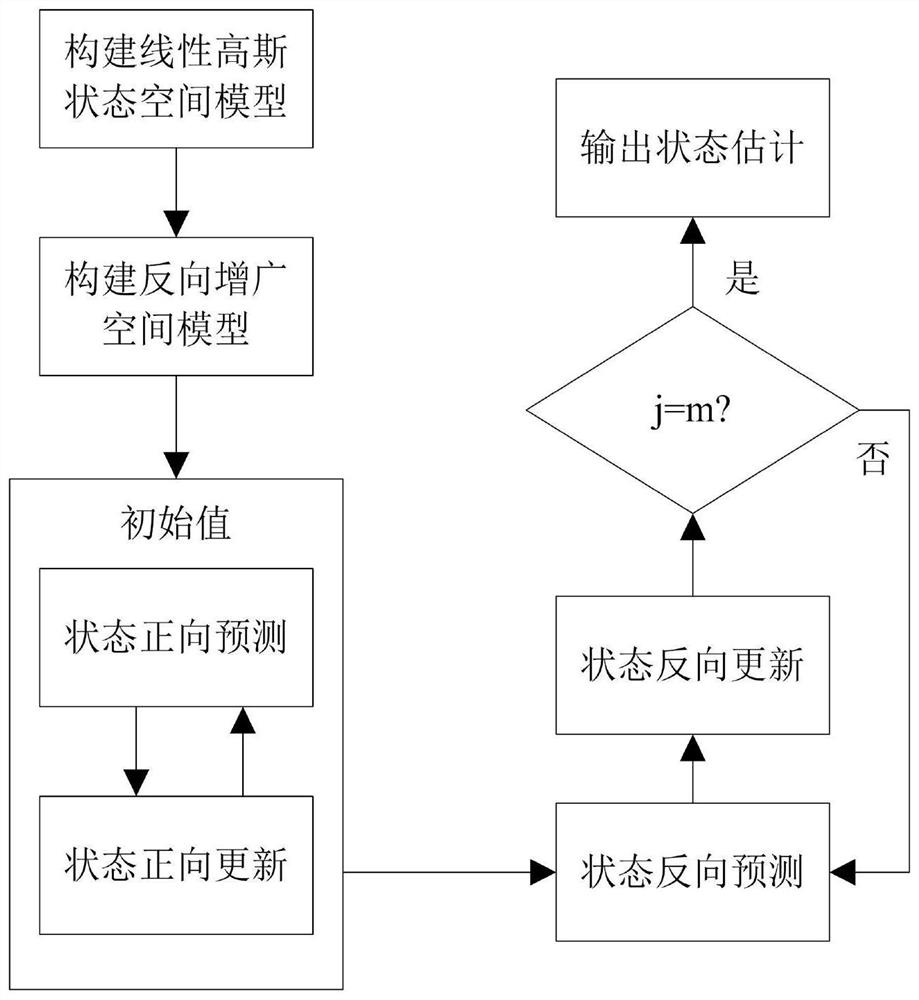
[0056] The embodiment of the present invention discloses a system state reverse estimation method that introduces a limited estimation interval, refer to figure 1 As shown, the specific steps of the reverse estimation method include,
[0057] In the first step, a linear Gaussian state-space model is constructed for the control loop including the controller:
[0058]
[0059] Among them, k is the time series; x k is the system state variable; y k is the noise-containing observation signal; u k-1 is the controller output; w k-1 is process white noise, and w k-1 ~N(0,Q k ) obey Gaussian distribution; Q k is the known process noise variance, v k is to measure white noise, and v k ~N(0,R k ) obey Gaussian distribution; R k is the observation noise variance; A is the dynamic matrix of the system state; E is the system actuator matrix; C is the observation dynamic matrix; D is the process noise dynamic matrix.
[0060] Due to the relatively large dimension of the state ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com