Point cloud denoising method combining feature detection method and vertex updating method
A point cloud denoising and update method technology, applied in the field of point cloud denoising, can solve problems such as poor recovery and fragmentation, and achieve the effect of recovering sharp features
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
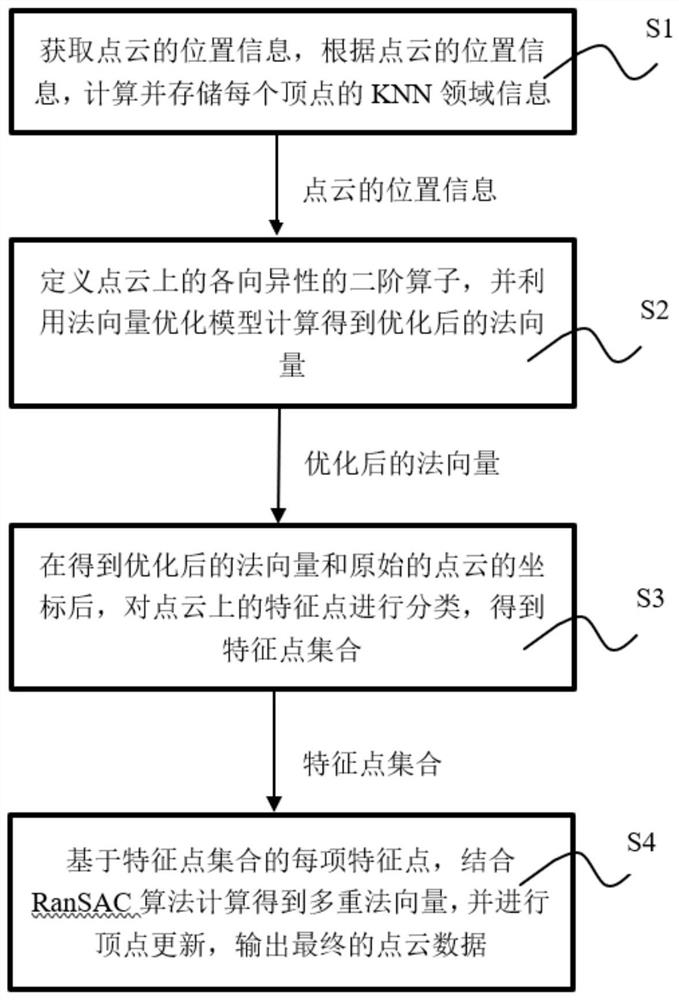
[0036] Aiming at the defect that the existing technology cannot restore small-scale features well, and a certain degree of fragmentation phenomenon will occur in the nonlinear smooth area, this embodiment discloses a point cloud denoising method combined with the vertex update method (For the implementation process of this method, please refer to figure 1 ), including the following steps:
[0037] S1. Obtain the position information of the point cloud, the position information of the point cloud includes the vertex {p of the point cloud i :i=1, 2, ..., V}, normal vector information {n i :i=1,2,...,V}, wherein, V represents the number of vertices, and i is the i-th vertex obtained; according to the position information of the point cloud, calculate and store the KNN neighborhood information of each point Specifically, when those skilled in the art obtain the position information of the point cloud, they can use the point cloud algorithm library (VCG) to obtain the vertex and ...
Embodiment 2
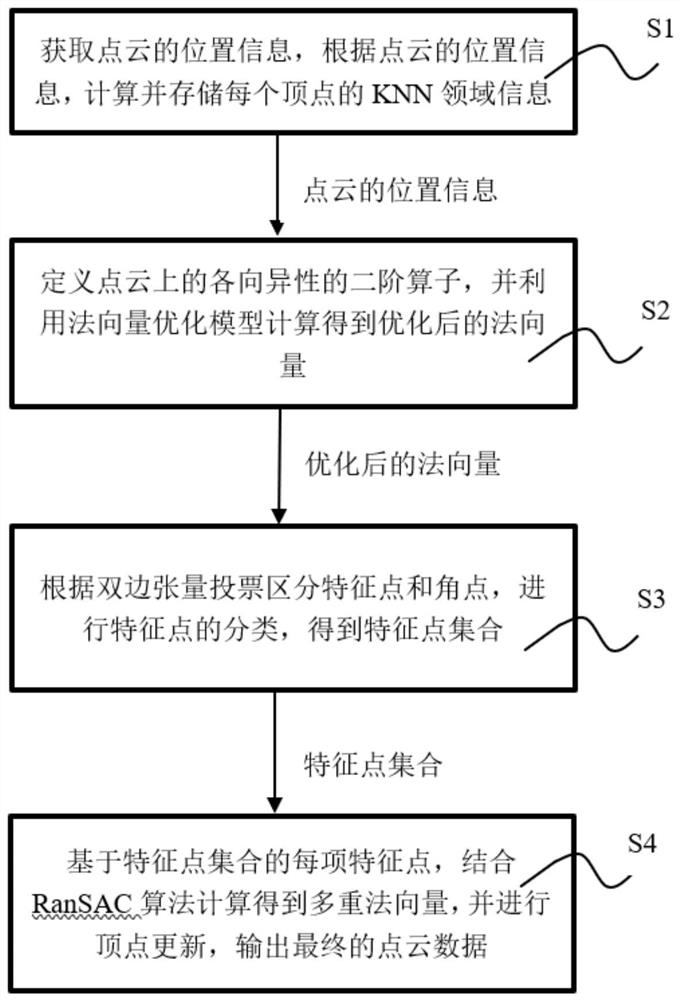
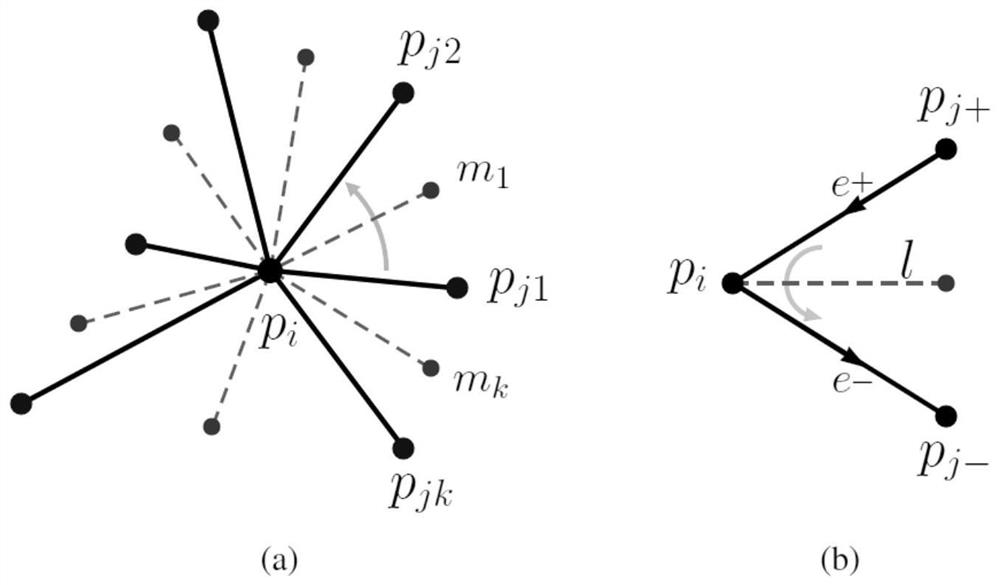
[0060] Based on embodiment 1, its difference is that in step S3 (the implementation process of this method please refer to figure 2 ), in step S3, when performing feature classification to the point cloud, including combining the point cloud normal vector, vertex information, and domain information, constructing the tensor information of the point cloud normal vector, and the tensor information of the vertex; wherein:
[0061] Tensor information of the constructed point cloud normal vector for:
[0062]
[0063] in, is the mth eigenvalue The corresponding eigenvectors.
[0064] Tensor information of the constructed vertices for:
[0065]
[0066] in, is the mth eigenvalue The corresponding eigenvectors.
[0067] After constructing the tensor information of the normal vector of the point cloud and the tensor information of the vertices, the feature point detection and classification are performed sequentially to obtain the feature point set. Distinguish fr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More