

Force feedback technology based surgical robot master-slave control experiment system and method
A robot master and control experiment technology, applied in the field of surgical robots, can solve the problems of inability to simulate experiments, inability to develop and experiment surgical robots intuitively, and shortage of experimental platforms for surgical robots, so as to achieve the effect of increasing the sense of reality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
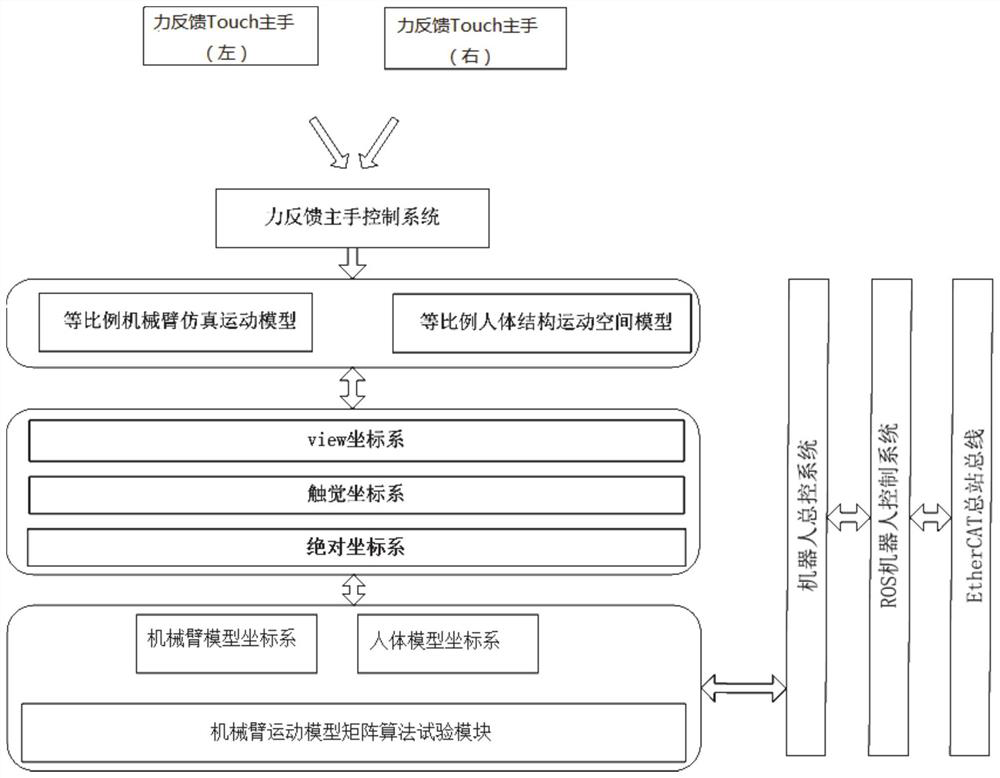
[0036] In a typical implementation of the present application, such as Figure 1-Figure 2 As shown, a master-slave control experimental system for surgical robots based on force feedback technology is proposed.
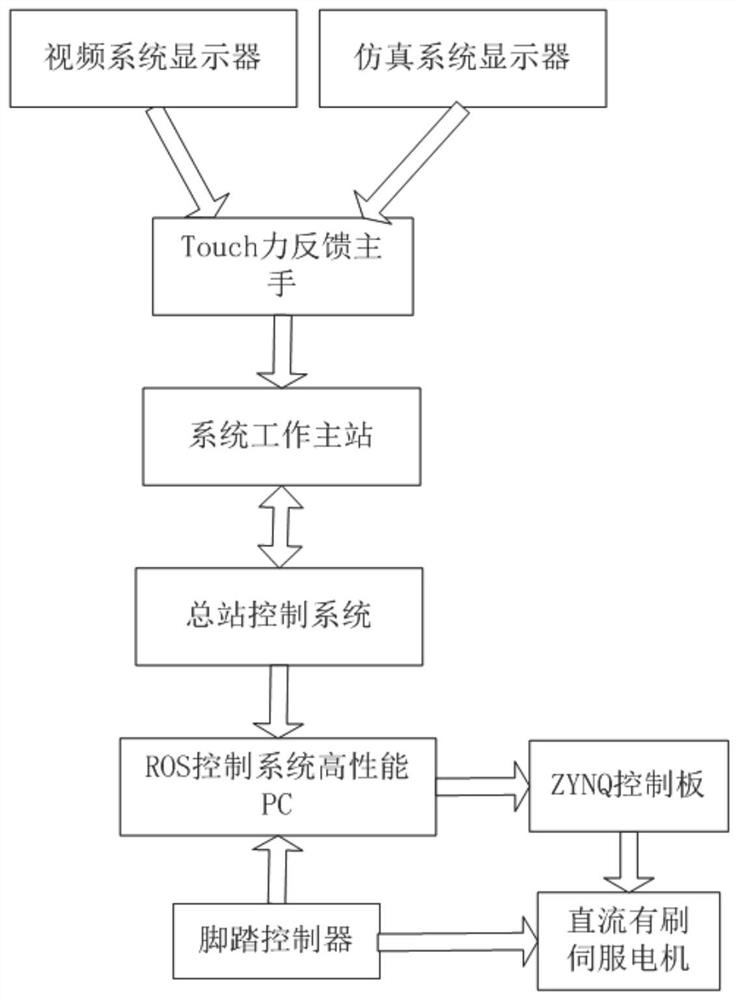
[0037] Its structure is as figure 1 As shown, the realistic force feedback technology includes the main operating hand, the system workstation, the display, the mapping simulation module, the slave hand simulation module and the human body structure simulation module; the main operating hands are two Touch force feedback main hands, The display is a high-definition video display device, and the system workstation also includes a robot ROS control system high-performance PC, ZYNQ control board, FMC high-performance extended Ethernet network card, MOXPOS drive, Maxon DC brushed servo motor, pedal controller, which connection relationship such as figure 2 As shown, an end-to-end simulation simulates the real-time response of a dual master hand input to a dual seven-ax...
Embodiment 2
[0049] This embodiment provides a master-slave control experimental method for surgical robots based on force feedback technology;
[0050] Establish the connection between the main operator and the system workstation, and configure the system of the main operator through the display device, and display the relevant dynamic parameters of the main operator;
[0051] Load the simulation motion model of the equal-scale manipulator, import the designed slave manipulator according to the naming rules or assembly sequence, and complete the parameter collection and data initialization; at the same time, the component is an equal-scale human structure motion space model;
[0052] Complete the HOME mapping between the master hand coordinate system and the slave arm;
[0053] Based on the spatial coordinate relationship between the master hand and the slave manipulator, set the VIEW coordinate system, tactile coordinate system, and absolute coordinate system, and complete the initializa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More