

Series-parallel robot error online compensation system and method based on coarse interpolation
A compensation system and robot technology, applied in general control systems, control/regulation systems, instruments, etc., can solve problems such as the influence of equipment operating speed, large monitoring data, and complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] In order to further understand the invention content, characteristics and effects of the present invention, the following embodiments are enumerated hereby, and detailed descriptions are as follows in conjunction with the accompanying drawings:
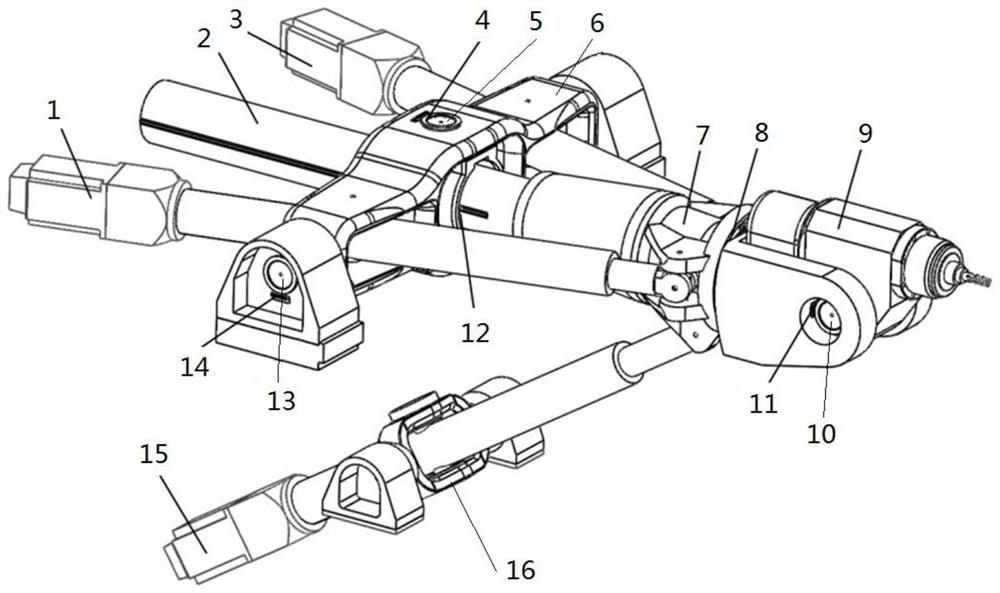
[0063] See Figure 1 to Figure 3 , a hybrid robot error online compensation system based on rough interpolation, including a hybrid robot arm, a first rotating bracket 16, a second rotating bracket 6, a detection system and a control system; wherein:
[0064] The hybrid mechanical arm includes a moving platform 7; three active arms driven by servo motors are hinged on the side of the moving platform 7, which are the first active arm, the second active arm, and the third active arm; the rear end of the moving platform 7 is fixed There is a driven support arm 2; the front end of the moving platform 7 is connected with an A / C-axis double-swing angle head 9 driven by a servo motor, wherein the C-axis of the A / C-axis double-swing an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More