

Road feeling simulation method, device, system and storage medium for remote driving
A technology of remote driving and road feeling simulation, which is applied in the field of remote driving, and can solve problems such as the inapplicability of the road feeling simulation of the steering-by-wire technology and the inability to directly feed back the road feeling information to the driver.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
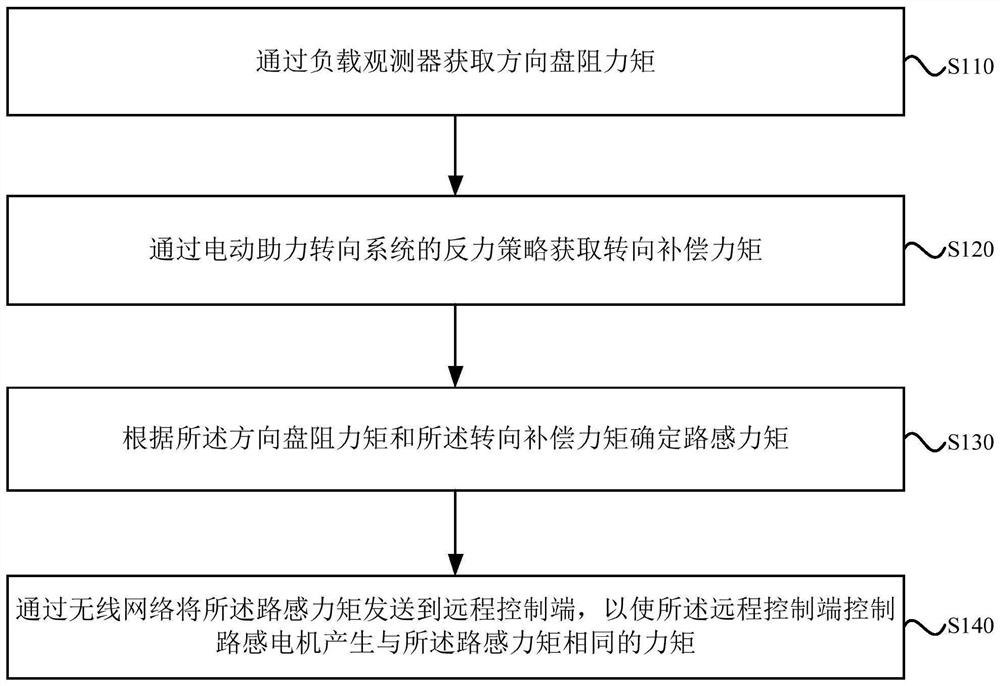
[0046]figure 1 A flow schematic of a remote driving road sense method for the embodiment of the present invention, the present embodiment can be applied to a remote driving application scenario. Such asfigure 1 As shown, the remote driving road sense simulation method provided in the embodiment of the present invention includes:
[0047]S110, acquire the steering wheel resistance torque through the load observer.
[0048]Specifically, the load observer is a steering load model of the vehicle steering system constructed at the onboard end control terminal. When the vehicle is steering, it can be seen as a steering load implies a certain force to the steering system. This force generated by the force For steering load torque, the steering load torque can be determined by the load observer. Since the driver is implemented by manipulating the vehicle, that is, the force of the steering wheel feedback is the force actually felt, so it is necessary to convert the steering load torque into a ste...
Embodiment 2
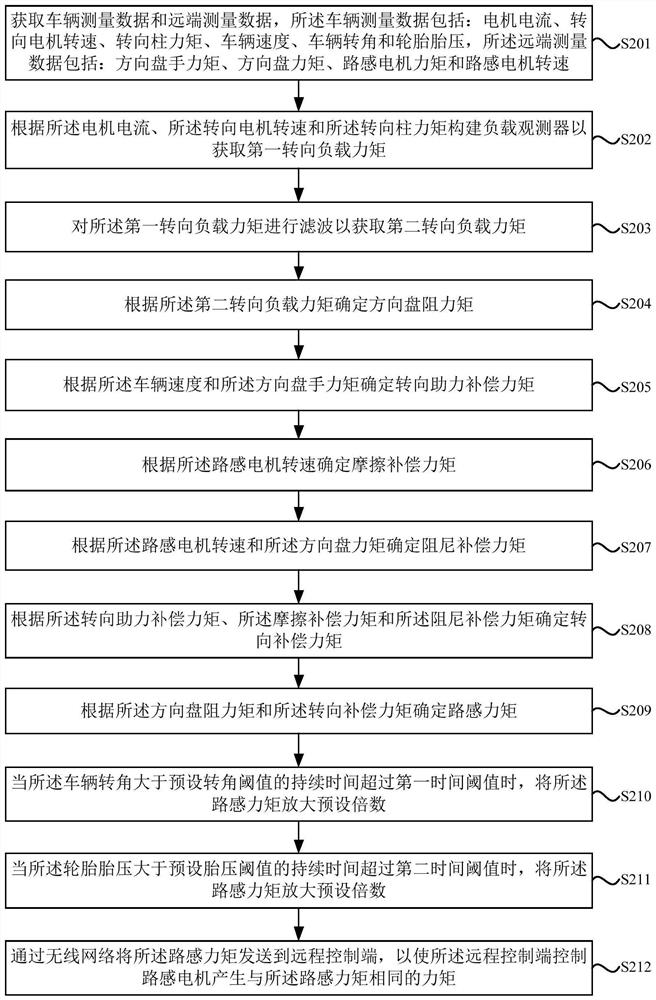
[0057]figure 2 A flow diagram of a remote driving sense simulation method according to the second embodiment of the present invention, and this embodiment is further refined to the above embodiment. Such asfigure 2 As shown, the remote driving road sense simulation method provided by the second embodiment of the present invention includes:
[0058]S201, acquire vehicle measurement data and remote measurement data, the vehicle measurement data comprises: motor current, steering motor speed, steering column torque, vehicle speed, vehicle corner, tire tire pressure, said far end measuring data includes: steering wheel hand Torque, steering wheel torque, road sensing motor torque and path motor speed.
[0059]Specifically, the vehicle measurement data is some measurement data from the vehicle carrier, which can be obtained from the entire vehicle CAN network. The distal measurement data refers to some of the measurement data in an analog cockpit in the remote control terminal, which is transm...
Embodiment 3
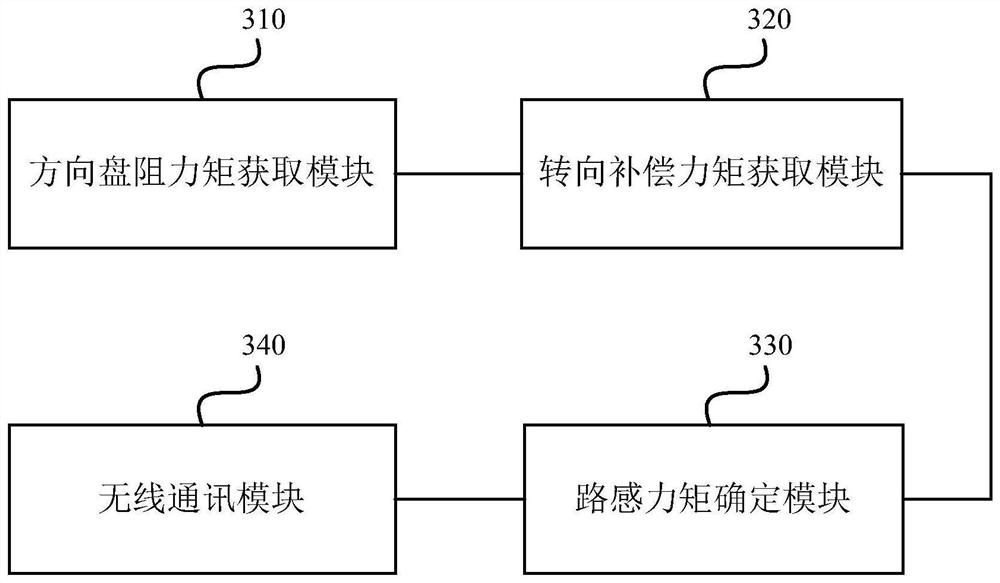
[0105]image 3 A schematic structural diagram of a remote driving road sense simulation apparatus provided in the third embodiment of the present invention, the present embodiment can be applied to a remote driving application scenario. The remote driving road sense simulation apparatus provided in this embodiment can realize the remote driving road sense method provided by any embodiment of the present invention, and there is a corresponding functional structure and beneficial effects of the implementation method, and the content described in this embodiment is not described in detail. A description of any method of the invention.
[0106]Such asimage 3 As shown, the remote driving road sense simulation apparatus provided in the first embodiment of the present invention includes: a steering wheel resistance torque acquiring module 310, a steering compensation torque acquiring module 320, a road sensation moment determining module 330, and a wireless communication module 340, wherein:
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More