

Human-computer interaction perception system and method for gas insulated switch visual inspection robot
A gas-insulated switch and visual inspection technology, applied in the field of human-computer interaction perception system, can solve problems such as inability to feed back robot positioning information in real time, and achieve the effect of improving the presence of human-computer interaction, facilitating inspection operation planning, and improving the efficiency of visual inspection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
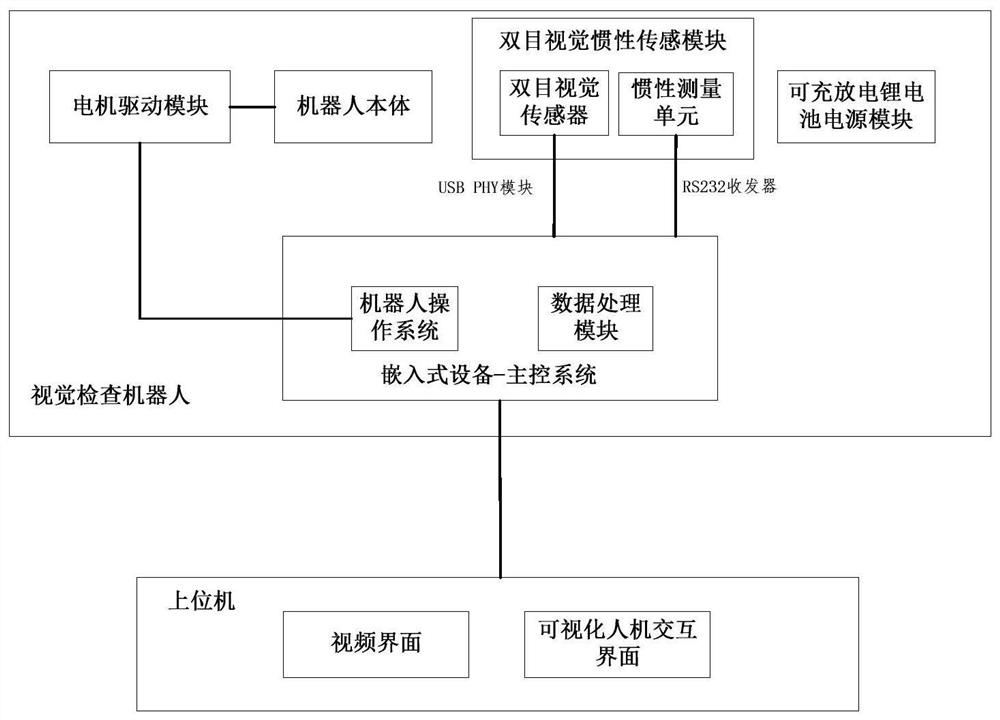
[0049] The visual inspection robot targeted by this embodiment is mainly a robot for inspection of gas-insulated switchgear in a 220kV substation. The human-computer interaction perception system of the provided gas-insulated switch visual inspection robot, such as figure 1 As shown, it includes a visual inspection robot placed in the gas insulated switchgear to inspect the gas insulated switch, a host computer communicating with the inspection robot, and a visual human-computer interaction interface installed in the host computer.
[0050] 1. Visual inspection robot
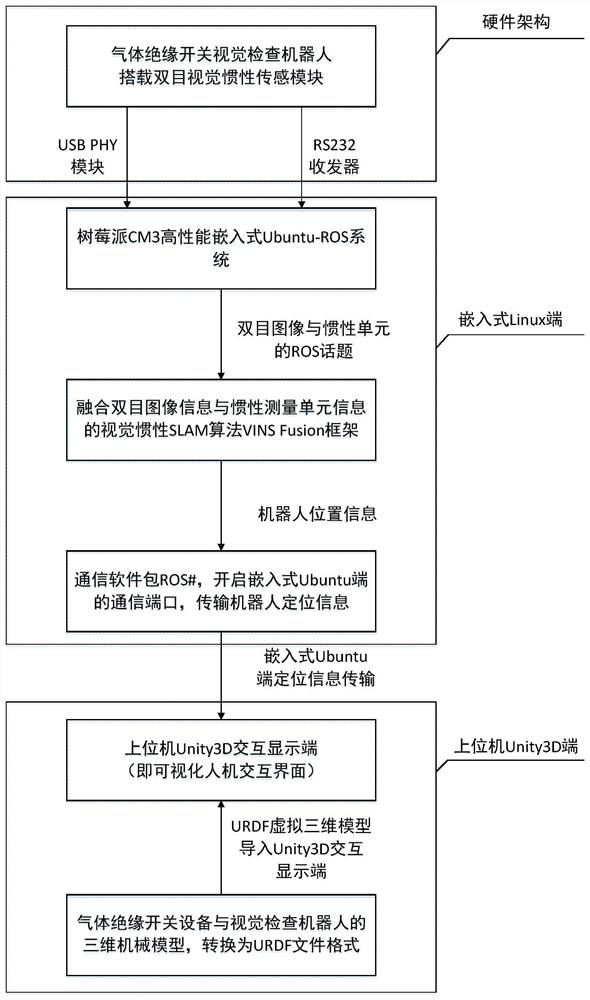
[0051] Such as figure 1 As shown, the above-mentioned visual inspection robot includes a robot body, a binocular visual-inertial sensor module, an embedded device, a rechargeable lithium battery power module and a motor drive module.
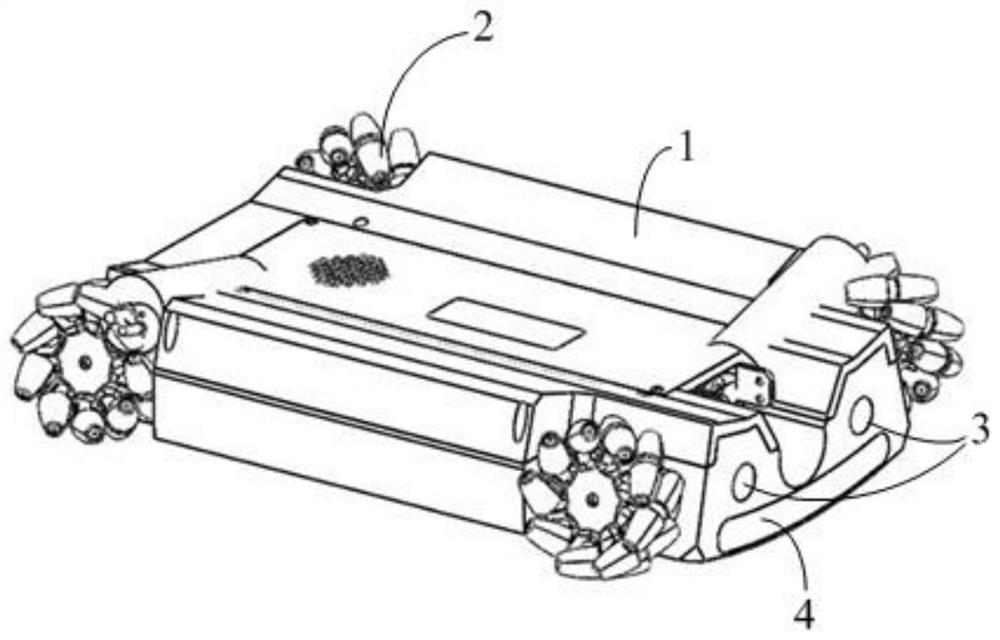
[0052] The robot body in this embodiment can adopt a conventional visual inspection robot currently used for visual inspection of power systems. Such as figure 2 As shown, th...
Embodiment 2
[0071] This embodiment is a further improvement on the human-computer interaction perception system of the gas-insulated switch visual inspection robot provided in Embodiment 1.
[0072] Such as Figure 4 As shown, the human-computer interaction perception system of the gas-insulated switch visual inspection robot provided in this embodiment, in addition to the visual inspection robot, the host computer and the visual human-computer interaction interface of the first embodiment, the host computer is further installed with a display for video information The video interface is convenient for the operator to judge whether there is a fault in the gas insulated switch.
[0073] The embedded device sends the video information collected by the binocular visual inertial sensing module to the video interface. In this embodiment, the mjpg-streamer library on the Ubuntu side of the main control system is used to send video information. The mjpg-streamer library can convert the video i...
Embodiment 3
[0078] This embodiment is a further improvement on the human-computer interaction perception system of the gas-insulated switch visual inspection robot provided in Embodiment 2.
[0079] Such as Figure 5 As shown, in this embodiment, a first storage module for storing robot position information and a second storage module for storing video information are further provided on the host computer side, and the second storage module is stored by storing the robot position information and the time stamp contained in the video information. A storage module is associated with a second storage module.
[0080] In this embodiment, the first storage module includes a CSV (Comma-Separated Values) file. Call the function API related to the input and output stream through the C# program. In Unity3D, the Odometry Subscriber script file associates the received actual robot position information with the visual inspection robot model, and at the same time, the received actual robot position i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More